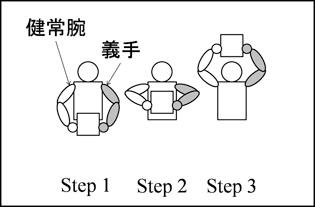
| 当研究室の目標は、日常生活のなかで人間と調和して行動できる「人間親和型ロボットシステム」の実現です。たとえば、肘および肩を失った障がい者(高位切断者)のための筋電義手の研究もその一つ。筋電義手とは、筋肉が発する電気信号を利用して関節のモーターを動かす義手です。高位切断者の場合は、残存する筋肉が少なく、駆動関節数が多くなるため、従来の筋電義手では失われた部位の機能を補うことが困難でした。そこで当研究室では発想を転換して両手の協調動作に着目。ニューラルネットワークを使って健常者の両手の動きを筋電義手に学習させておき、健常腕の動作パターンに合わせて自動的に協調動作をつくり出す画期的な筋電義手の開発に取り組んでいます。 |
 |