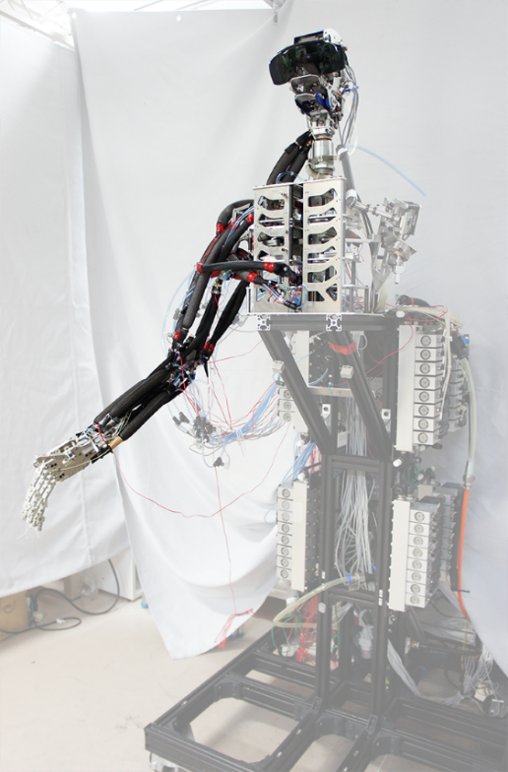
筋骨格ロボットアームの開発
ヒトの筋骨格構造は非常に複雑で,工学的には一見,制御がしにくくなるなどの問題にしかならないようにも見えます. この研究では,「ヒトの複雑な筋骨格構造にはヒトの優れた運動能力を実現するための大きな利点を生み出している」という考えのもと, 特にヒトの腕に注目し,その複雑な構造が持つ特性を可能な限り反映したロボットアームを開発し,実際にヒトが行っているさまざまな動作をロボットアームに行わせることで, その未知の利点の解明と工学的応用を目指しています.
Reference
- Arne Hitzmann, Hiroaki Masuda, Shuhei ikemoto, and Koh Hosoda, "Anthropomorphic Musculoskeletal ten degrees-of-freedom Robot Arm driven by Pneumatic Artificial Muscles", Advanced Robotics, Vol. 32, Issue 15, pp. 865-878, 2018.
- Koh Hosoda, Shunsuke Sekimoto, Yoichi Nishigori, Shinya Takamuku, and Shuhei Ikemoto, "Anthropomorphic Muscular-Skeletal Robotic Upper Limb For Understanding Embodied Intelligence", Advanced Robotics, Vol. 26, No. 7, pp. 729-744, 2012.