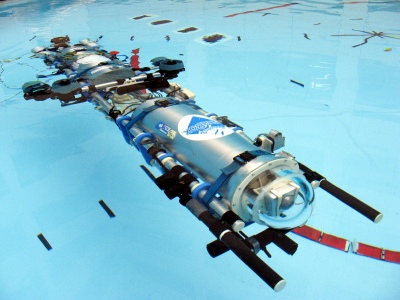
AquaBox III
Researches » Robots » Underwater robots » AquaBox III
分類
水中用・自律型ロボット
特徴
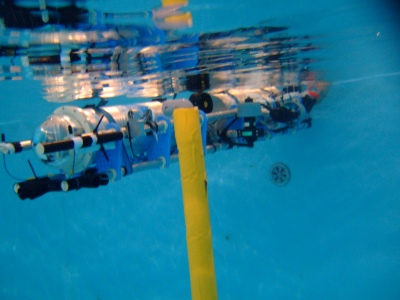
カメラ(全方位カメラ,下方カメラ)や音響センサにより、無索状態での自律行動が可能
研究内容
沿岸域における観測を目的とした小型水中ロボットの開発
水中ロボットのための音源定位、線形行列不等式に基づく水中ロボットの多目的制御
スペック
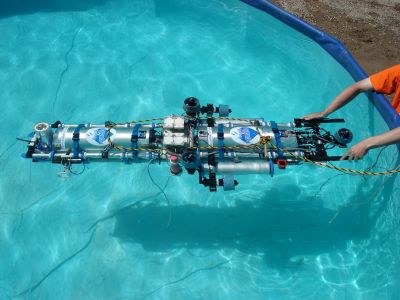
全長1.7 [m]全幅0.6 [m]
全高0.31 [m]総重量40 [kg]
コントローラ
遠隔操作モード/自律モード
PID制御によるコントローラ
線形行列不等式に基づくゲインスケジューリングコントローラ(開発中)
電源(動力源)
ロボット内部にリチウムポリマーバッテリー
(駆動用29.6[V],PC用25.9[V])を搭載
外部電源
アクチュエータ
移動用水中スラスタ5基(100[W])
(前後方向2基、上下方向2基、ピッチ角方向1基)
センサ
圧力センサ(深度計測用)、角速度センサ、
電磁流速計、TCM2(方位角、姿勢角)、
全方位カメラ、下方カメラ、
サイドスキャンソナー
オプション
超音波通信機器(SEATEL 10BST)
デバラスタ
その他
耐水深度50[m]
1号機、2号機のパーツを流用して開発