DaryaBird
Researches » Robots » Underwater robots » DaryaBird

分類
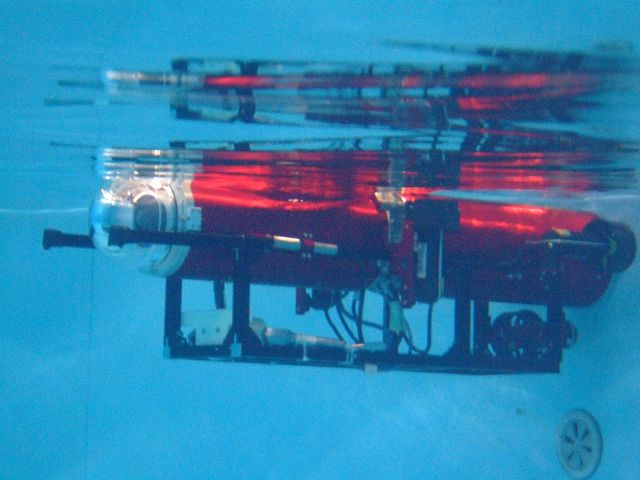
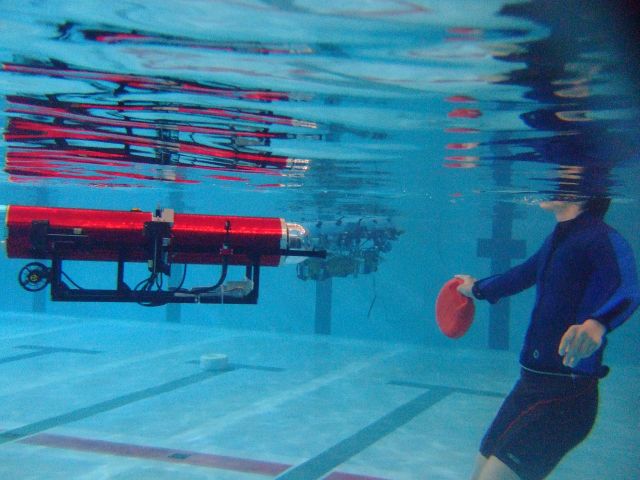
水中用・自律型ロボット
特徴
小型のシステムであり,簡単に運搬可能.
パンチルト可能なカメラを搭載しており,環境調査や防波堤等の保守・点検に用いる事が可能.
AUV(自律行動)/ROV(人による操作)を変更可能であり,幅広いミッションに対応可能.
研究内容
・画像情報に基づくナビゲーション
(ライントラッキング,ブイドッキング,自己位置同定)
・タンカー等の大型艇を想定した船底掃除
(反力制御,自己位置同定,経路計画)
・機械・電子システムのモジュール化
(他ロボットでも使用可能なデバイス・機構の開発)
スペック
全長1.08 [m]全幅0.45 [m]
全高0.34 [m]総重量32 [kg]
コントローラ
遠隔操作モード(ROV)/自律モード(AUV)
下位の運動制御:PID制御
上位の行動制御は:ビジョンに基づくナビゲーション
電源(動力源)
リチウムポリマーバッテリー
29.6 [V],5000 [mAh] 若しくは外部電源から供給可能
稼働時間
3時間
アクチュエータ
SeaBotix製スラスタ5基(110[W])
(前後方向2基、上下方向2基、左右方向1基)
センサ
圧力センサ(深度計測用)
プロペラ式流速センサ
加速度センサ(3軸)
角速度センサ(2軸)
方位角センサ+姿勢センサ(TCM2)
パンチルトカメラ
下方カメラ
オプション
外部バッテリ
音響ソナーによる自己位置同定システム(USLS)
その他
耐水深度50[m]