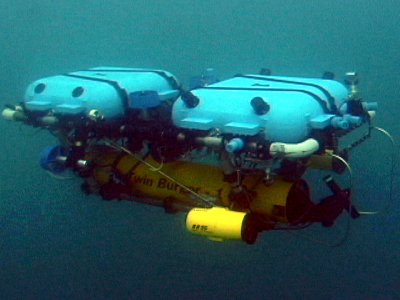
Twin-Burger
Researches » Robots » Underwater robots » Twin-Burger

分類
水中用・自律型ロボット
特徴
様々なセンサとアクチュエータを搭載し水中で自律的知的行動が可能
研究内容
自己組織化マップ(SOM: Self-Organizing Map)を用いて,高次元な周囲の情報から特徴を抽出しロボットをナビゲーションする.モジュラーネットワーク型自己組織化マップ(mnSOM)を用いた適応型コントローラについて研究中.
スペック
全長 :1.54[m]
全幅 :0.86[m]
全高 :0.54[m]
総重量:120[kg]
コントローラ
PID制御によるコントローラ(開発中)
ニューラルネットワークコントローラ
電源(動力源)
Ni-Cdバッテリ25.2V/10Ah, 28.8V/10Ah
アクチュエータ
移動用水中スラスタ5基
(前後方向:2基、左右方向1基、上下方向:2基)
センサ
圧力センサ(深度計測用)
姿勢センサ(方位角、姿勢角)
下方カメラ
超音波測距センサ(8個)
Doppler Velocity Log(速度センサなどの複合センサ)
オプション
水中用マニピュレータを開発中
ビジョンシステムにシリコン網膜を搭載予定
その他
東京大学で作成された1号機.2号機が存在する.