Vision System
Researches » Robots » Others » Vision System

分類
生体模倣型ロボットビジョン組み込みプラットフォームの開発
特徴
軽量, 柔軟なインターフェース,プログラム可能,リアルタイム処理
研究内容
生体模倣型ロボットビジョンというのは、生物の視覚系の機能を模倣したセンサです。生物の視覚が現在のコンピュータビジョンシステムとはかなり異なった仕組みに基づき高い処理能力を発揮していることから、この生物の視覚系の機能を模倣するさまざまな人工網膜を使うことによって、コンピュータビジョンシステムの能力を向上させることが期待できる。そして、この研究がレスキューや、ヒトと機械のインタフェースとしてのジェスチャ認識、車運転の自動化などに利用できると考えられます。
全長180[mm]全幅130[mm]
全高-総重量260[g]
CPU
Windows CE 5.0 CPU clock 416 MHz ROM&RAM 64MB
電源(動力源)
DC 3.3[V] 0.6[Ah]
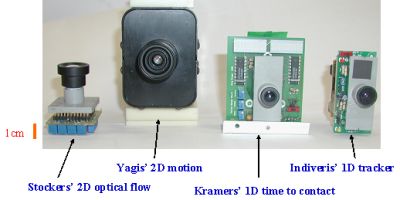
センサ
optic flow sensor
Yagis’ 2D motion sensor
Kramers’ 1D time to contact sensor
Indiveris’ 1D tracker sensor
オプション
なし
その他なし