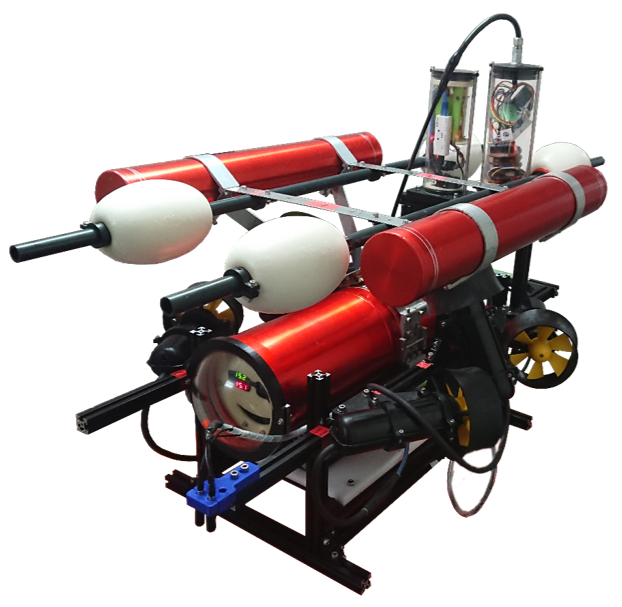
Frame is structured for adding additional features needed
Sensor and motor driver communication standard is unified by RS232.
This robot can function as AUV by recognizing the surrounding environment and the situation.
1st Place '13 Underwater Robot convention in JAMSTEC (2013.09)
1st Place 50th Anniversary of Kitakyushu - Underwater Robot Festival (2013.10)
17th Place 17th Robosub Competition (2014.08)
1st Place Okinawa Underwater Robot Contest (2014.12)
19th Place 18th Robosub Competition (2015.08)
Chairman Award '15 Underwater Robot convention in JAMSTEC (2015.09)
2nd Place Hibikino High Tech Challenge (2016.03)
2nd Place Underwater Robotics Competition in Okinawa (2017.11)
3rd Place Techno-Ocean 2018 (2018.05)
25th Place RoboSub Competition (2018.08)
3rd Place Okinawa Underwater Contest (2018.10)
We are researchers under the Ishii Laboratory at Kyushu Institute of Technology.
We specialize on creating underwater vehicles and studying its behavior.
Our team consists of different nationalities and different levels (from Undergraduate to PHD).
We specialize in either Machinery, Circuitry or Software Developing (or a mix of these).




















Copyright © 2017 Kyutech Underwater Robotics Team. All Rights Reserved. Template by W3layouts