 |
| |
 |
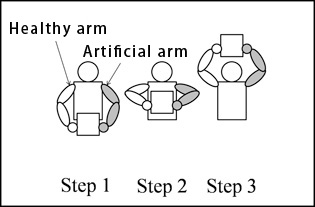
| Our laboratory is working to create a human-friendly robot system that can act with humans in daily life. Our work includes research for a myoelectric prosthetic arm for above-elbow amputees who have lost their elbows and shoulders. The myoelectric prosthetic arm is an artificial arm that drives a motor in the joint, using myoelectric signals emitted from the muscles. Above-elbow amputees have had difficulties replacing the function of the lost parts with the conventional myoelectric prosthetic arm because they have only a small number of muscles left, thereby requiring numerous active joints. We have changed our research to focus on the coordinated motion of both hands. We are developing a new prosthetic arm that can learn the movements of both hands of a healthy person by using a neural network and move in coordination with the motion pattern of the healthy arm. |
 |
 |
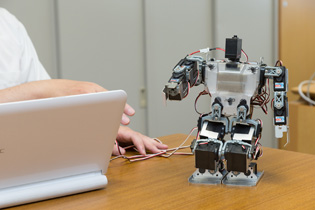
| Students learn the basics of control by using a small robot walking on two legs. Operating the robot requires writing a program that calculates the height in millimeters to lift each foot and the angle in degrees to move each joint, in accordance with a mathematical model. The programming difficulty can be adjusted to match the student learning level, including walking only, swinging arms to maintain balance and increasing walking speed. Students will have to correct the program over again and again until the robot can walk properly. During this process, students are also expected to develop the patience to handle repeated troubleshooting and achieve their goals. |
 |
|
|
|
|