ニューラルネットワークからの数式抽出
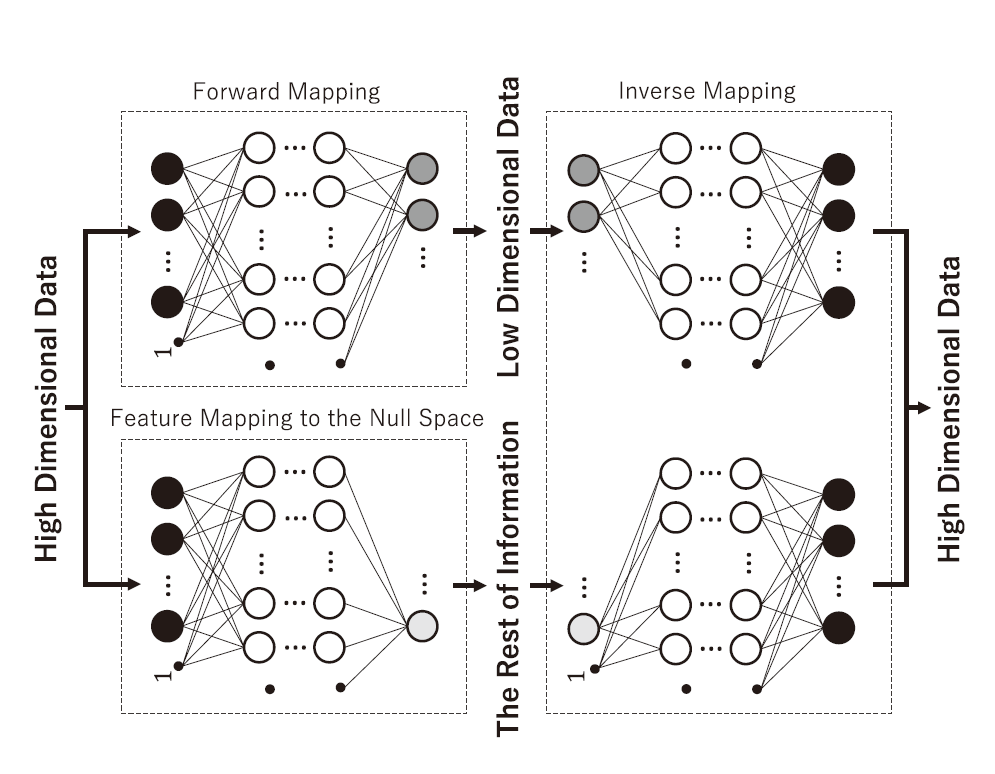
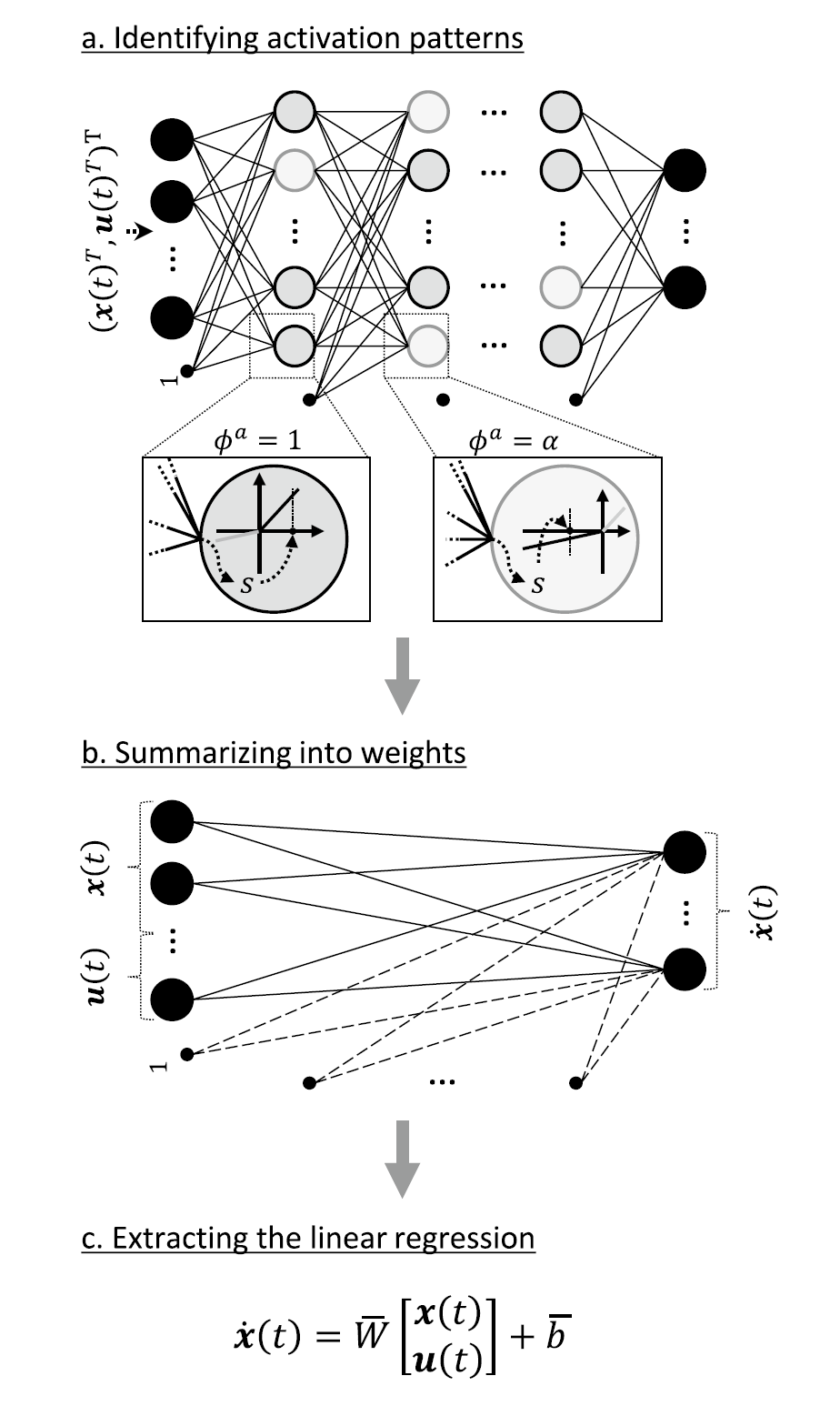
入力と出力のデータを沢山得ることが入出力関係を数式でモデル化することよりも比較的簡単な時,ニューラルネットワーク(NN)を用いて入出力関係を近似することが選択肢の一つとされます. しかし,NNを使うとき,「近似された入出力関係が具体的にどのような数式になるのか?」という点については,「良く分からない」とされることが一般的でした. 私たちは,「活性化関数としてReLU やLeaky ReLU などの区分線形な関数を用いる場合,NNそのものが区分線形な関数になる」という特徴に着目して,その時の入力に応じてNNが近似する関係と等価な線形モデルを抽出する簡単な方法を提案しています. この方法を使うことで,ニューラルネットワークでロボットの動力学を近似しつつも,その結果に基づいて制御理論に則った制御をすることが可能になると考えられます.
Reference
- Shuhei Ikemoto, Kazuma Takahara, Taiki Kumi, and Koh Hosoda, "Neural Model Extraction for Model-Based Control of a Neural Network Forward Model", SN Computer Science, Vol. 2, Issue 1, Pages 54, 2021.
- Duan Yu, Shuhei Ikemoto, and Koh Hosoda, "Optimal Feedback Control based on Analytical Linear Models extracted from Neural Networks trained for Nonlinear Systems", IEEE/RSJ International Conference on Intelligent Robots and Systems, 2018.