Zaurus
Researches » Robots » Wheel Robot » Zaurus

分類
操作型、車輪移動型
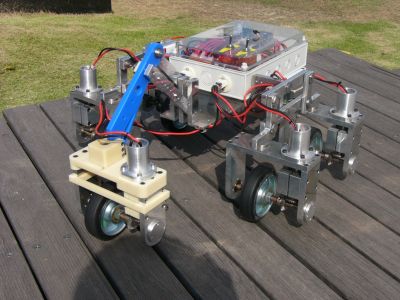
特徴
不整地走行可能な車輪型移動ロボット.リンク機構を採用し,車輪直径10[cm]に対し最大20[cm](車輪直径の2倍)の段差を乗り越えることが可能.
研究内容
リンク機構を採用することで,車輪が苦手とする不整地を走行可能にする.現在,機構解析ソフトDADS,Matlabによるシミュレーションを行い,ニューラルネットコントローラを設計中.将来的には,階段昇降可能な電動車椅子や災害時に活躍するレスキューロボットを目指している.
全長660 [mm]全幅530 [mm]
全高310 [mm]総重量13 [kg]
コントローラ
赤外線リモコンによるマニュアル操作
ニューラルネットワークを用いたコントローラ
電源(動力源)
Ni-MH 7.2[V] 3.3[Ah] x2
アクチュエータ
車輪駆動用DCモータ(6個)
センサ
電流センサ x6:トルク検出用
角度センサ x3:リンク角検出用
姿勢センサ
光学式エンコーダ:車体速度検出用
オプション
特に無し
その他
全方位段差乗り越え機構を開発予定