
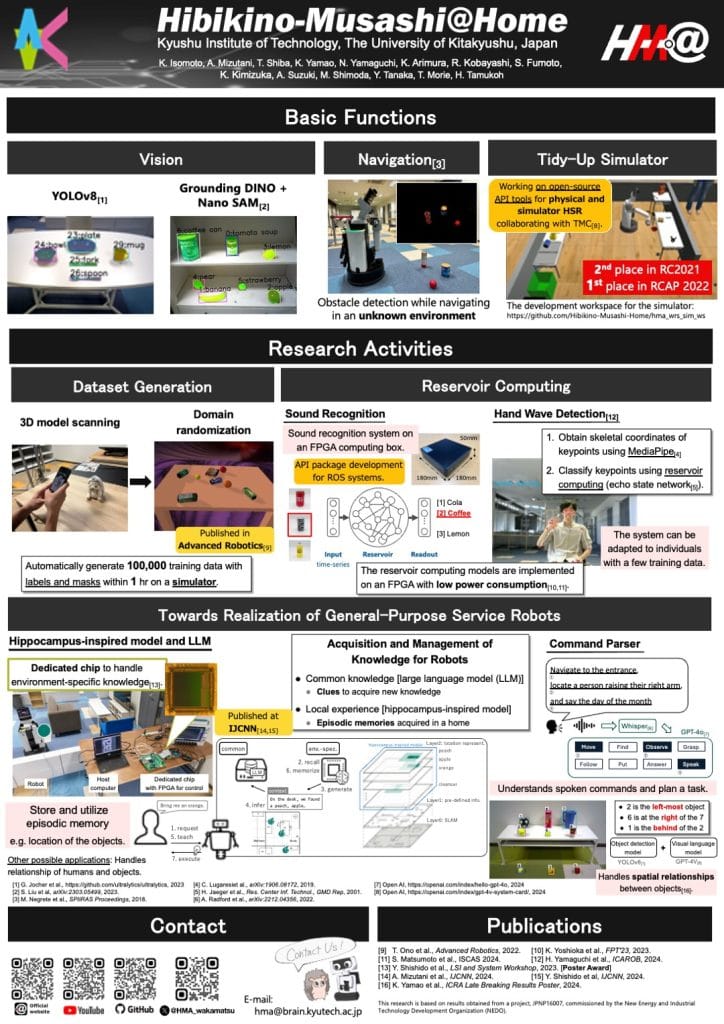
Basic Functions
The basic functions of our robot are explained. These techniques are combined to achieve a complex robot’s action.
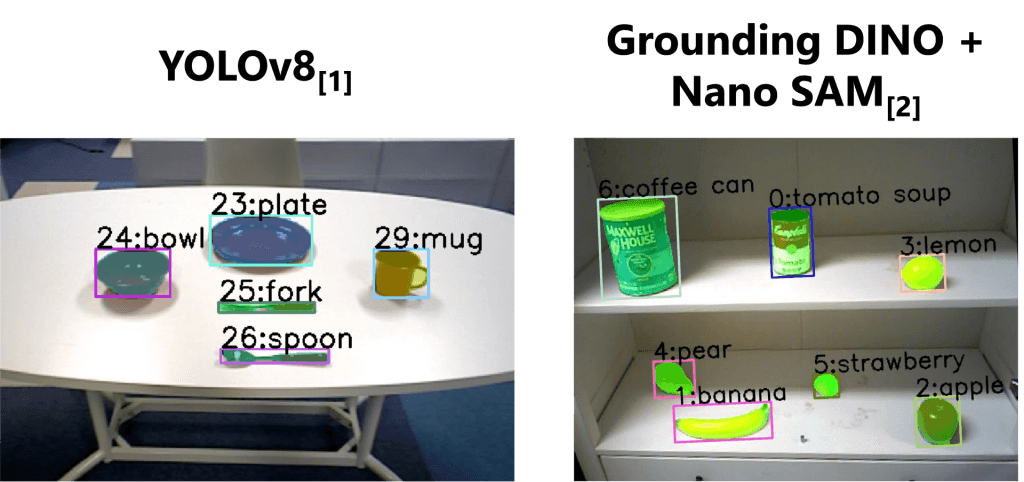
Vision
We use YOLOv8 and Grounding DINO + Nano SAM methods depending on the situation.
Navigation
We modify the navigation system by Pumas.

Tidy-up Simulator
The tidy-up task on the HSR simulator is available on GitHub.

https://github.com/Hibikino-Musashi-Home/hma_wrs_sim_ws
Research Activities
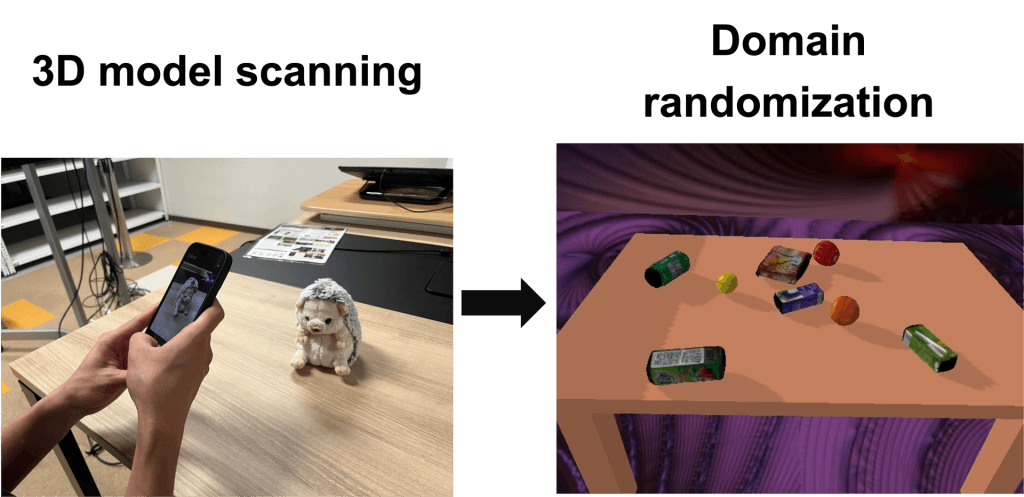
Dataset Generation
A dataset generator is a powerful tool for creating training datasets for the YOLO system.
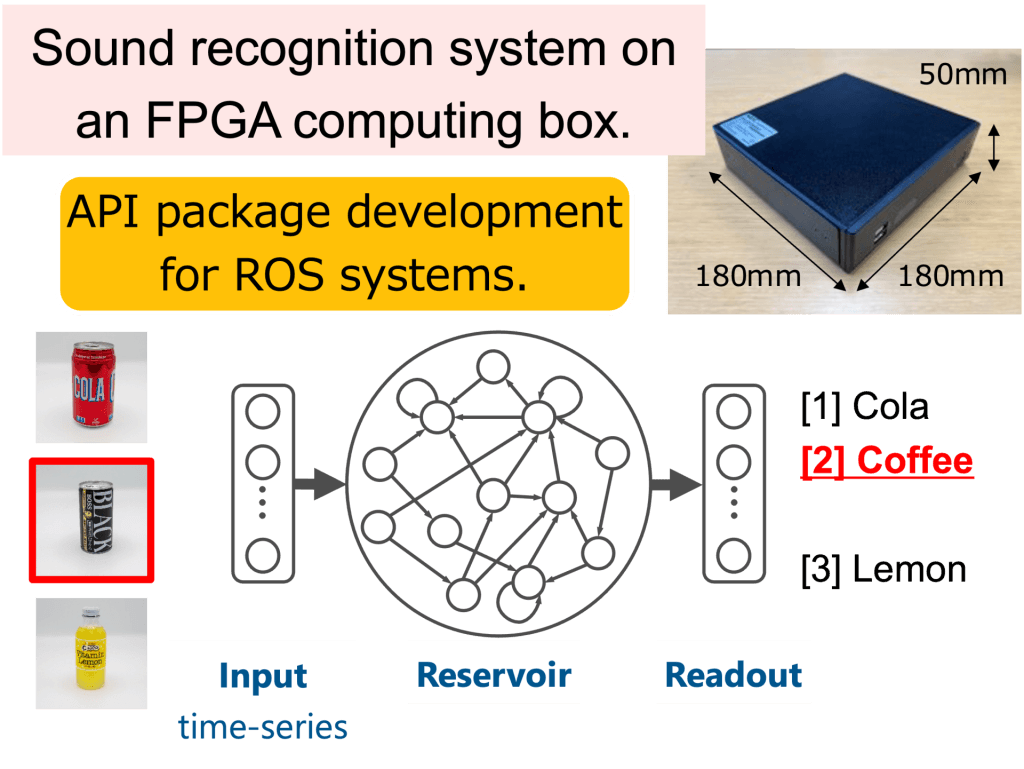
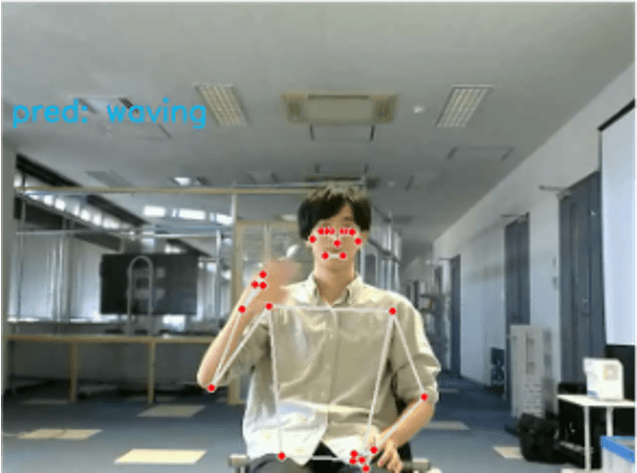
Reservoir Computing
Reservoir computing is the lightweight model to handle the time-series information. We conduct research on this method for sound recognition and hand-wave detection systems.
Towards Realization of General-Purpose Service Robots
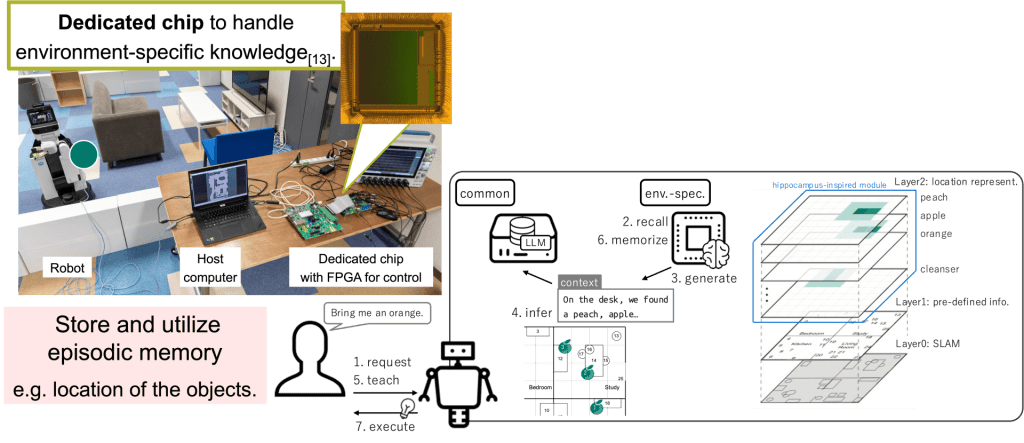
We conduct research on brain-inspired systems for home service robots. The hippocampus is the brain part that handles episodic memories. The system handles episodic memories acquired by the experience of the robot.
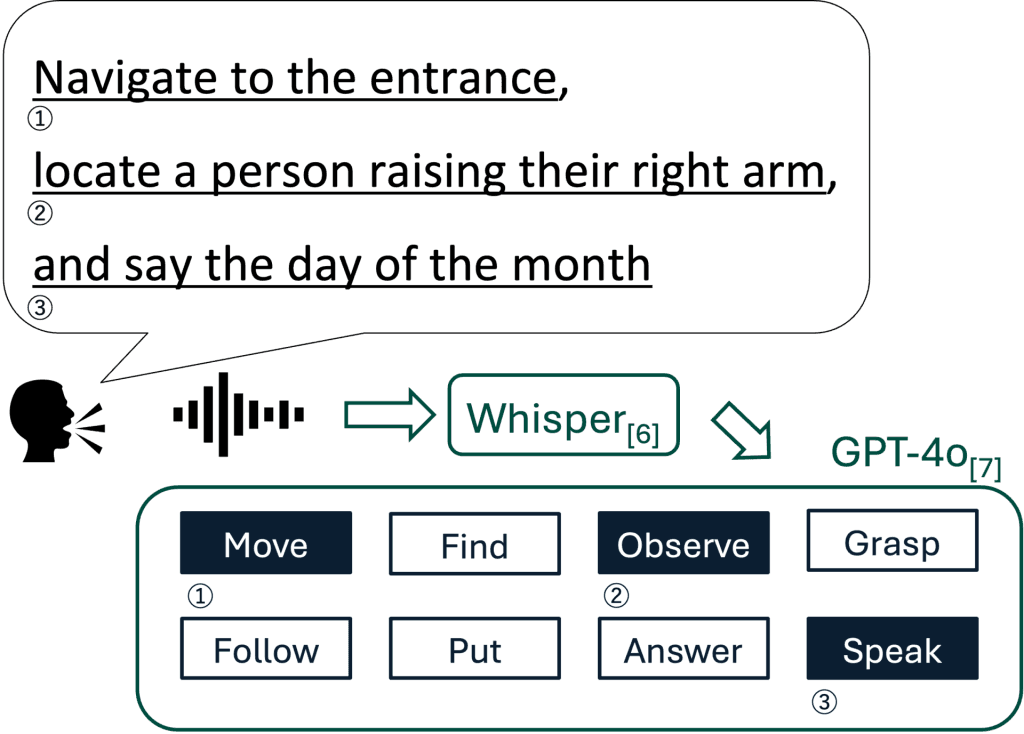
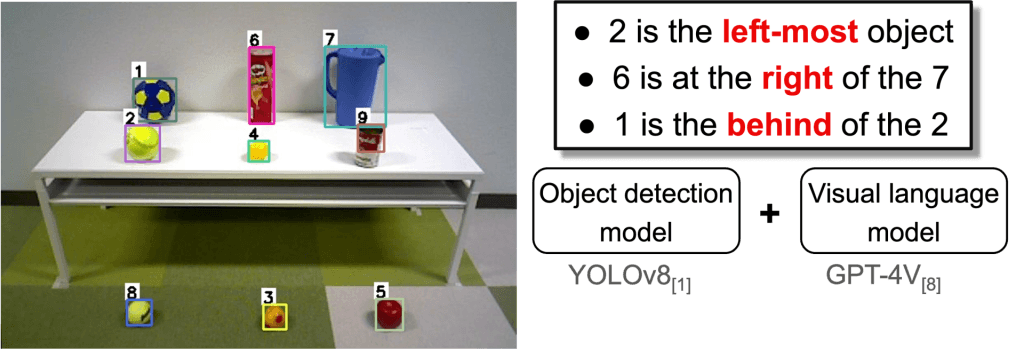
Our GPSR system is powered by large language model. We also implement the function to understand the spatial relationship of the objects.
References
[1] G. Jocher et al., https://github.com/ultralytics/ultralytics, 2023.
[2] S. Liu et al, arXiv:2303.05499, 2023.
[3] M. Negrete et al., SPIIRAS Proceedings, 2018.
[4] C. Lugaresiet al., arXiv:1906.08172, 2019.
[5] H. Jaeger et al., Res. Center Inf. Technol., GMD Rep, 2001.
[6] A. Radford et al., arXiv:2212.04356, 2022.
[7] Open AI, https://openai.com/index/hello-gpt-4o, 2024.
[8] Open AI, https://openai.com/index/gpt-4v-system-card/, 2024
Publications
[9] T. Ono et al., Advanced Robotics, 2022.
[10] K. Yoshioka et al., FPT’23, 2023.
[11] S. Matsumoto et al., ISCAS 2024.
[12] H. Yamaguchi et al., ICAROB, 2024.
[13] Y. Shishido et al., LSI and System Workshop, 2023. [Poster Award]
[14] A. Mizutani et al., IJCNN, 2024.
[15] Y. Shishido et al, IJCNN, 2024.
[16] K. Yamao et al., ICRA Late Breaking Results Poster, 2024.
TDP2024: https://arxiv.org/abs/2410.06192