Tensegrity Robot Arm driven by Pneumatic Actuators
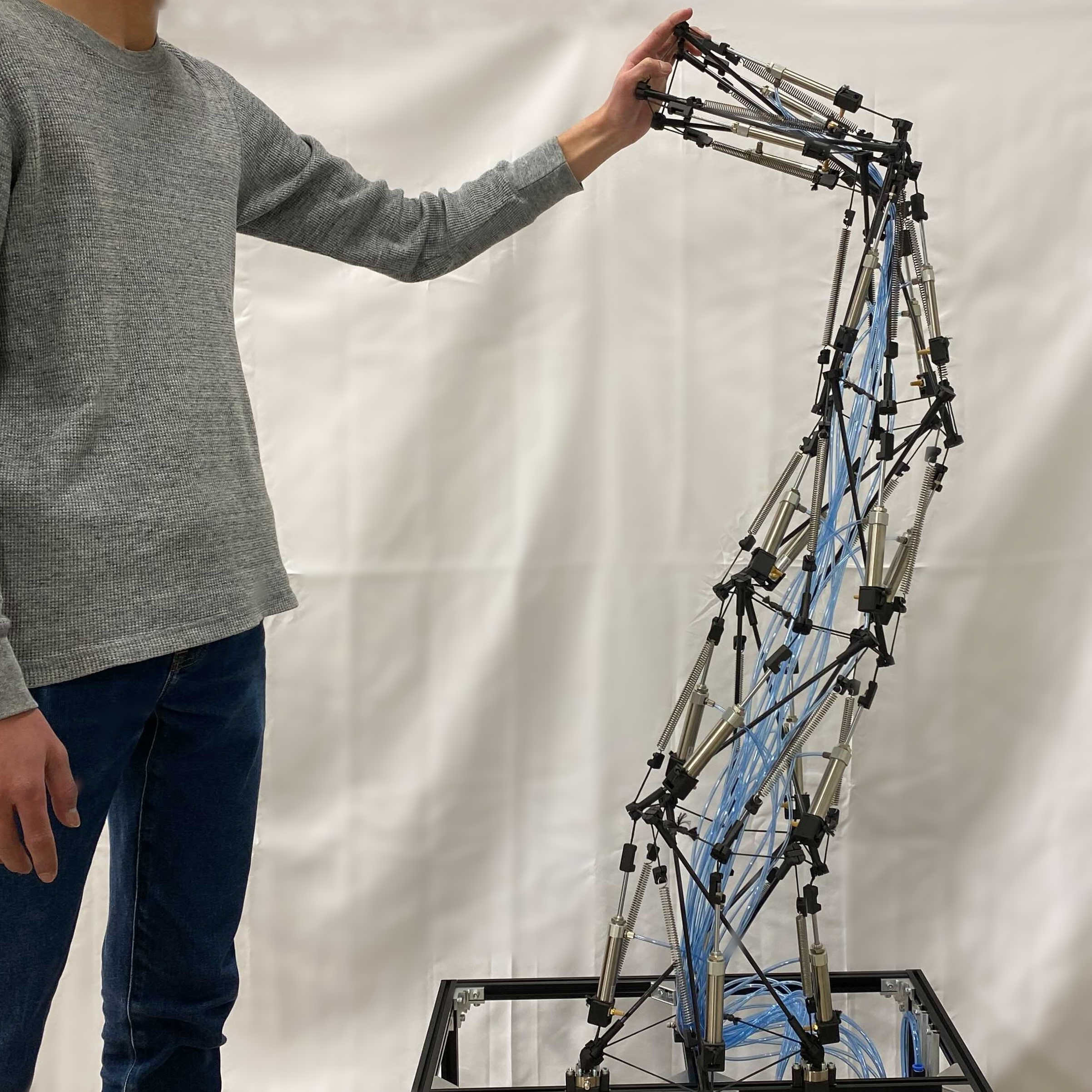
We are currently developing a flexible tensegrity robot arm that can continuously bending by pneumatic actuators, based on the model shown above. Our paper has been published! It is open access, so please read it and check attached videos if you are interested.
Reference
- Shuhei Ikemoto, Kenta Tsukamoto, and Yuhei Yoshimitsu, "Development of a Modular Tensegrity Robot Arm Capable of Continuous Bending", Frontiers in Robotics and AI, 01 November 2021, https://doi.org/10.3389/frobt.2021.774253.