テンセグリティロボットアームの開発
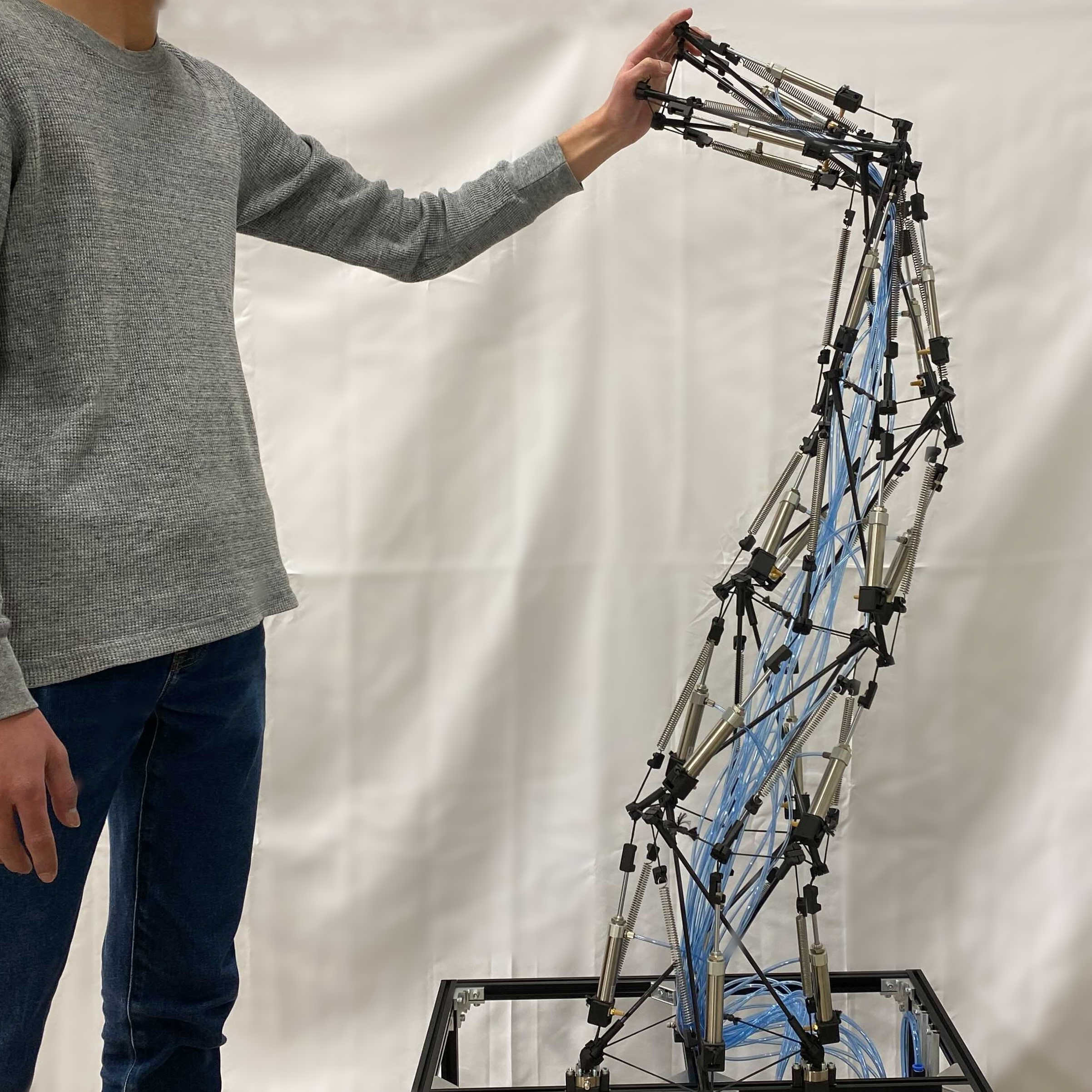
現在,多自由度の複雑な動きと軽量・柔軟による安全な相互作用の両方を高いレベルで両立でき,生物規範型の運動制御・学習に使うことができるロボットプラットフォームを実現すべく, 先に示した模型をベースとして,アクチュエータで能動的に形状を変化させることが可能な柔軟テンセグリティロボットアームの開発に取り組んでいます.論文が出版されました.動画もありますのでご興味がありましたらぜひご一読ください.
Reference
- Shuhei Ikemoto, Kenta Tsukamoto, and Yuhei Yoshimitsu, "Development of a Modular Tensegrity Robot Arm Capable of Continuous Bending", Frontiers in Robotics and AI, 01 November 2021, https://doi.org/10.3389/frobt.2021.774253.