現在進行中のプロジェクト
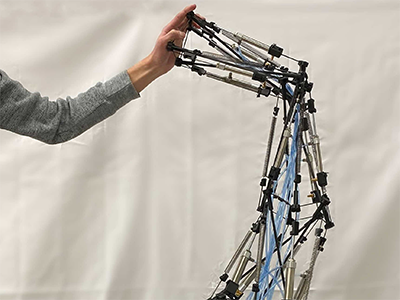
テンセグリティロボット

触覚を有する吸着パッド
過去に実施したプロジェクト
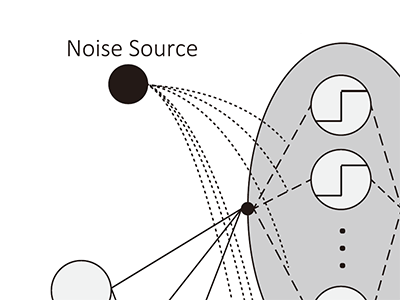
ノイズによって機能化されるNN
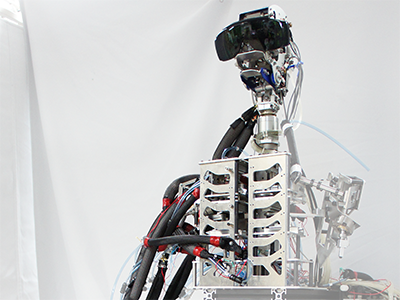
筋骨格ロボット
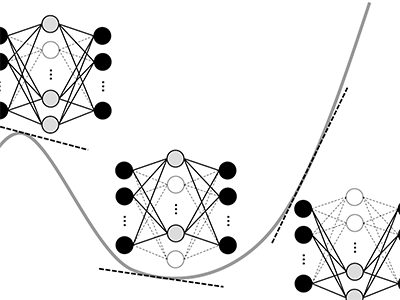
NNによる運動学・動力学モデリング
確率共鳴
物理的な人間-ロボット間インタラクション
© Copyrights Shuhei Ikemoto. All Rights Reserved