| 研究業績リスト |
| [1] |
徳永憲洋, 肝付謙二, 安井湘三, 古川徹生, 関数空間型SOM, 日本神経回路学会, Vol.12, No.1, pp.39-51, 2005
|
| [2] |
K. Tokunaga, T. Furukawa, S. Yasui, Modular Network SOM : Self-Organizing Maps in Function Space, Neural Information Processing - Letters and Reviews, Vol.9, No.1, pp.15-22, 2005
|
| [3] |
K. Tokunaga and T. Furukawa, Modular network SOM: Theory, algorithm and applications, Lecture Notes in Computer Science, Vol.4232, pp.958-967, 2006
|
| [4] |
T. Furukawa, SOM of SOMs : Self-Organizing Map Which Maps a Group of Self-Organizing Maps, Lecture Notes in Computer Science, Vol.3696, pp.391-396, 2005
|
| [5] |
Tetsuo Furukawa, Self-Organizing Homotopy Network, Proceedings of the 6th Int. Workshop on Self-Organizing Maps (WSOM 2007), Bielefeld/Germany, 2007
|
| [6] |
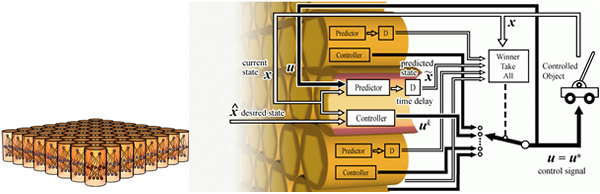
T. Minatohara, T. Furukawa, Self-Organizing Adaptive Controllers: Application to the Inverted Pendulum, Proceedings of the 5th Workshop on Self-Organizing Maps (WSOM05), pp.41-48, France, 2005.9
|
| [7] |
湊原哲也,古川徹生,適応性と汎化性を考慮した自己組織化適応制御器, 電子情報通信学会論文誌,Vol.J91-D,No.4.
|
| [8] |
西田周平,石井和男,古川徹生, 水中ロボットにおける自己組織的行動獲得システム(第一報:自己組織化マップを用いた運動制御システムの提案), 日本船舶海洋工学会論文集, Vol.3, pp.205-213, 2006
|
|