1. 生体の視覚系に学んだ組み込み視覚システム
[概要]
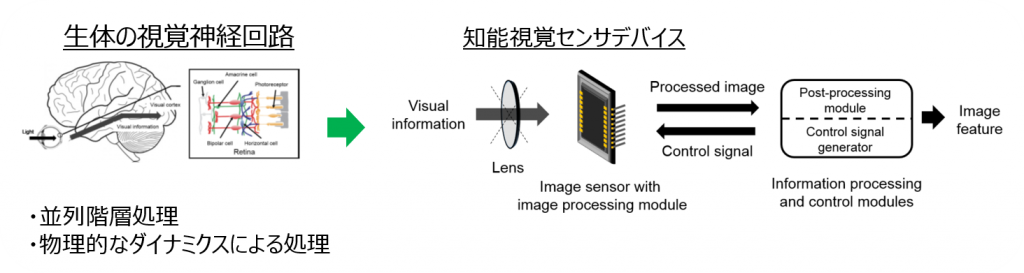
生体の網膜には、外界の三次元構造を反映した二次元像が投影される。視覚とは、この眼底に投影された二次元網膜像から、目の前の三次元世界を解釈し、行動に必要な情報を取り出す情報処理過程である。この意味で、生体の視覚系は、外界の様子を高精細かつ高い色再現性で記録するデジタルカメラなどの撮像装置とは、目的の異なる情報処理システムである。そのため、その設計原理も大きく異なる。例えば、国防高等研究計画局(DARPA)によるロボットカーレースである DARPA Grand Challenge に参加した自律型ロボットカーでは、計算処理に約1 kWの電力が必要であったのに対し、ハチは数十 μW 程度のエネルギーで視覚ナビゲーションを実現していると言われている(*)。本研究室では、このような生体視覚系に着目し、網膜をはじめとする感覚器・神経回路・身体構造の相互作用から、効率的な視覚情報処理の計算原理と設計指針を明らかにする研究を行う。
(*)Liu, S. C., & Delbruck, T. (2010). Neuromorphic sensory systems. Current opinion in neurobiology, 20(3), 288-295.
課題やキーワード:
FPGA によるイメージセンサ及び視覚情報処理モデル演算用回路の開発、生体視覚系の処理を規範とした処理機構の提案、生体視覚神経回路のニューラルイメージの再現、色恒常性、明るさ恒常性、順応機構 etc…
2. 生物の眼の動きを再現する眼球ロボットの開発
[概要]
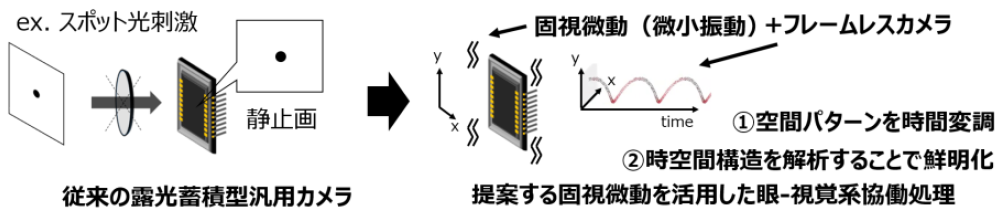
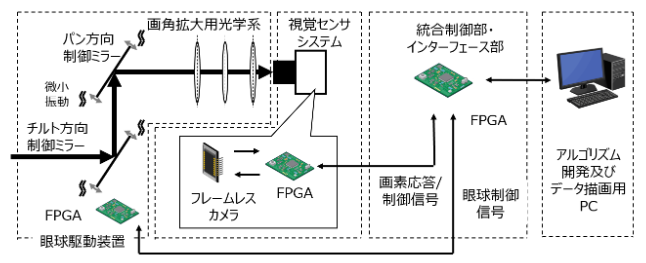
生体は視覚情報で空間認知を行う際、その情報処理に神経系だけでなく積極的に眼球運動を活用していることが示唆されています。本研究では対象物を注視している際に生じる固視微動と呼ばれる微小な振動性の眼球運動に着目します。固視微動は視覚機能との関係性が活発に議論されており、例えば細かい形状の物体の認識課題で、神経系のハードウェア限界を超えるイメージング性能に寄与していると示唆されています。これはある時刻において外界を受光素子によって空間的に標本化した情報だけでなく、時空間的な情報を解析に利用しているためと考えられています。本研究では固視微動のための微動光学系を設計し、生体視覚系規範型フレームレスカメラと組み合わせることで、眼-視覚系規範型ロボットビジョンを構築します。構築したロボットビジョンにより、固視微動と情報処理機構を協働させることにより、注視中の対象物の空間解像度の向上や両眼装置により奥行き精度の向上が望めるかを検証します。
3. イベント駆動型センシング技術の開発とその応用