1. 屋外対応RGB-Dカメラを用いたアーム位置決めシステム
課題やキーワード :
FPGA開発、画像処理アルゴリズム開発、高速マニピュレータ機構開発、組み込みソフトウェア開発
2. 屋外における照明変化に強いロボットビジョン技術
課題やキーワード :
色恒常性、明るさ恒常性、光順応
3. 低遅延型画像センシングを活用した高速マニピュレーション
課題やキーワード :
3次元点群処理アルゴリズム開発(前処理に加えて特に円柱や穴検出)、アームとの統合ソフトウェア開発
4. 水棲生物の電気感覚に学んだ生物検出・電気定位システムとその応用
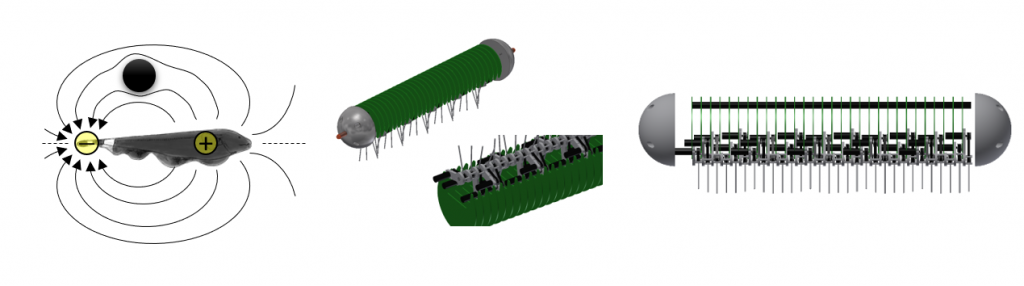
電気魚と呼ばれる水棲生物は他の生物の筋肉の収縮に伴うイオンの移動に起因した電気的活動を検知することで、海底に隠れた他の動物の存在を知覚します。また自身が体の周囲に作り出した電場の変形を感じ取ることで 泥水の中での航行定位に利用している生物もいます。そのような生物は電気感覚機構に合わせた特別な移動様式を有しています。これらの生体の機構に学ぶことで視界が不明瞭な環境で活躍する新たなセンサシステムや移動ロボットの構築を目指しています。
(参考として)https://nxr.northwestern.edu/people/malcolm-maciver
課題 やキーワード :
FPGA 回路開発、電位計測用アナログ回路設計、ヒレ型移動機構の開発、ナビゲーション技術開発、機械学習法 etc…
課題やキーワード :
ロボットのソフトウェア開発・組み立て、IoT用クラウドシステムの構築、フェノタイピング、
3次元点群処理 、形態計測、葉かき動作、 機械学習 etc…
→ Research