
自律型海中ロボットを用いた海洋資源調査
地球表面の7割以上を占める海には魚介類などの水産資源だけでなく,メタンハイドレートや石油などのエネルギ資源,熱水鉱床やマンガンクラストなどの鉱物資源など,豊富な資源があると知られていますが,いまだ多くの資源量や分布状況,資源生成のメカニズムが明らかになっていません.その主な原因の1つとして,実際の海で有用なデータを持ってこれる実践的かつ先端的な水中ロボットや観測機器の開発が遅れていること挙げられます.実海域で有用なデータを計測できることを大前提とし,西田研究室では企業や地方自治体と連携しながら自律型海中ロボットやそのロボットに搭載するセンサデバイスなどを開発しています.下記にこれまでの調査で得られた,調査結果の一例を示します.
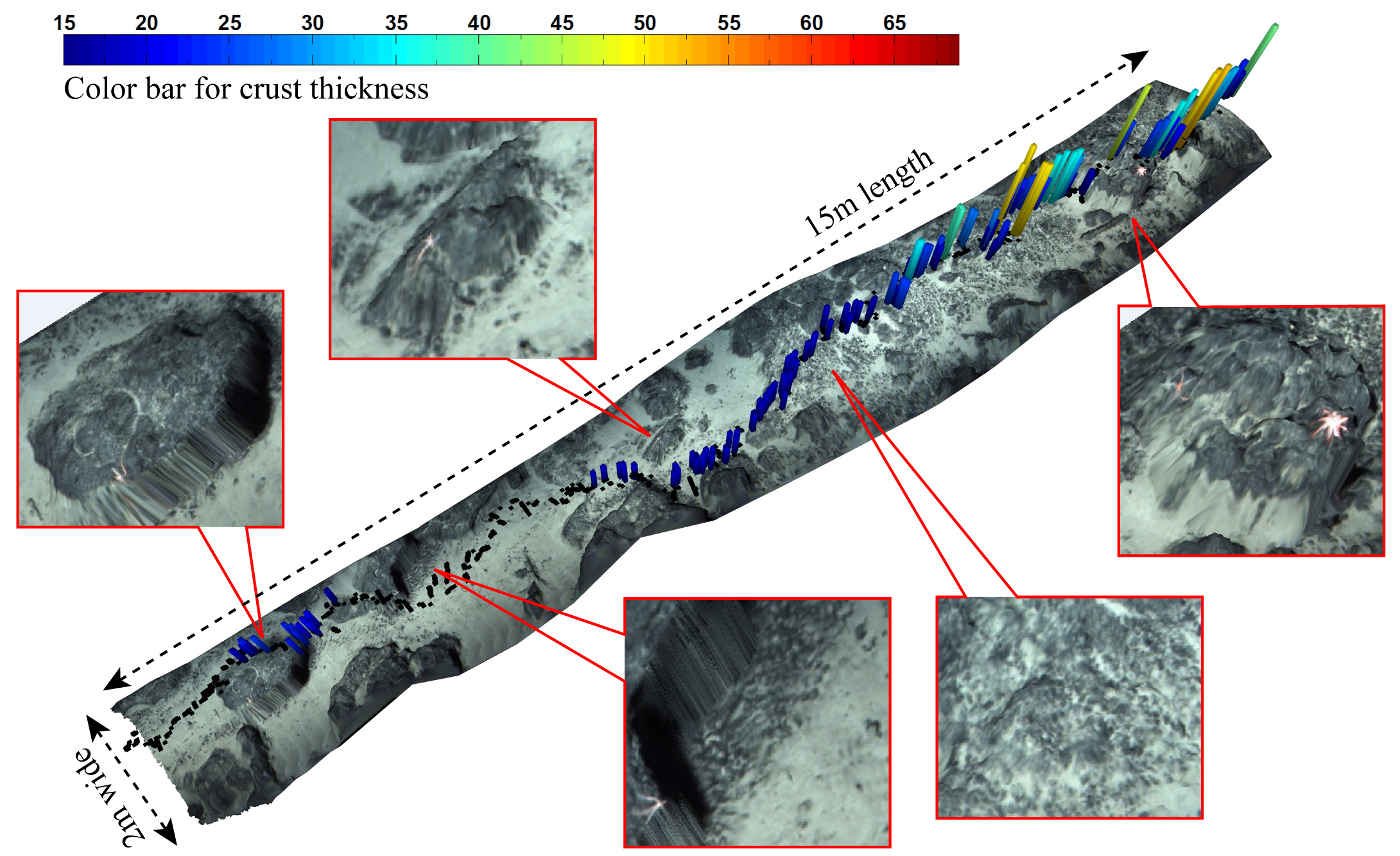
Fig. コバルトリッチクラストの3Dデータ
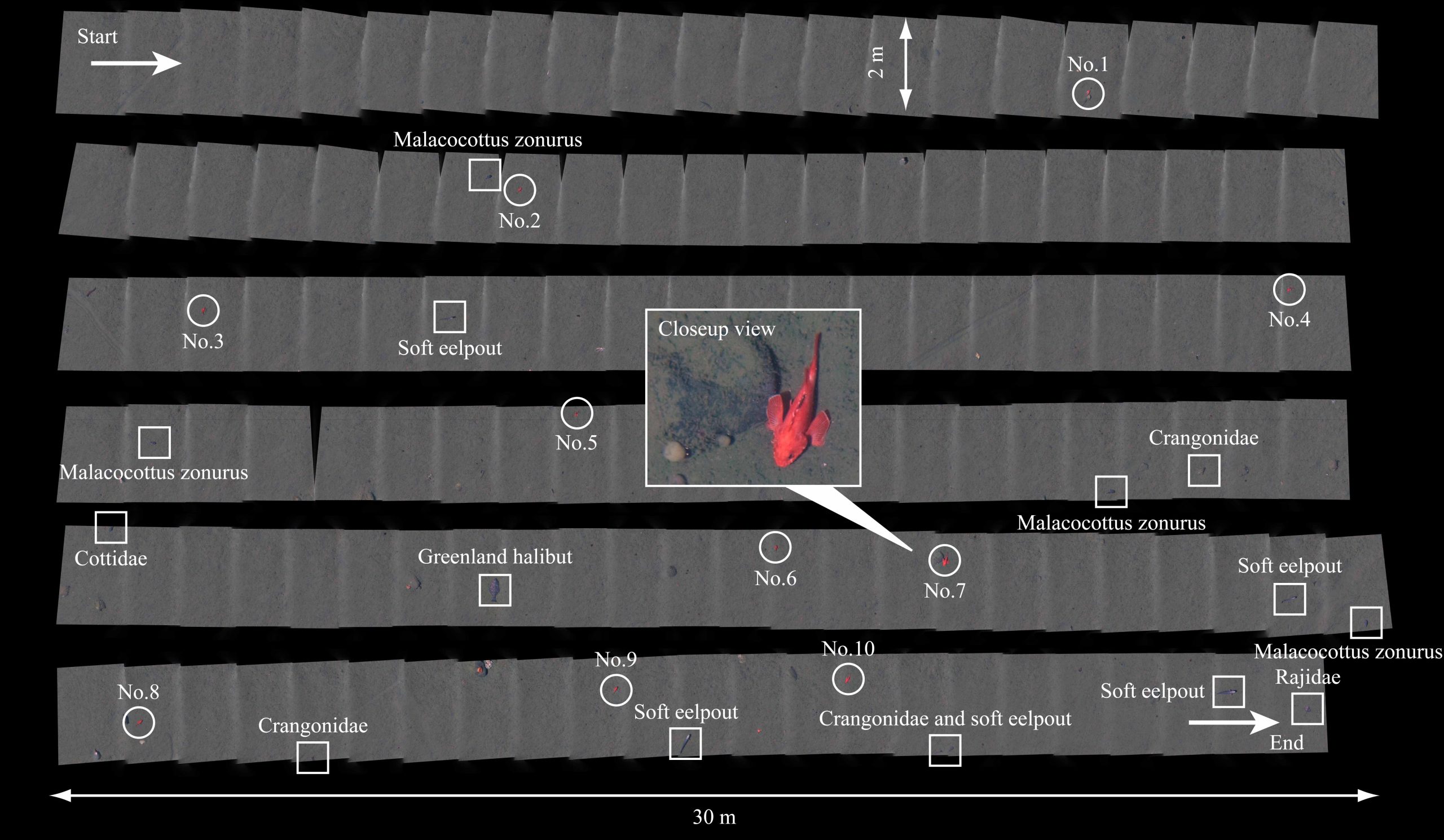
Fig. 網走沖の海底モザイク画像
効率的な養殖魚生産のための無人給餌船
水産資源の減少に伴い,安定的に魚介類を市場に流通できる養殖業の強化が世界的に望まれているが,日本の養殖業は停滞しています.その主な要因の一つとして,養殖魚への給餌の問題が挙げられます.給餌する餌の量はコスト面から必要最低限に留めたいが,給餌量が不十分だと養殖魚の発育が悪くなり漁労収入が低下します.漁労収入をあげるため適量の餌を給餌する必要がありますが,養殖魚の空腹状態を見極めるのに熟練した技術を必要不可欠でるため,自動化が進んでいません.残餌がなく,かつ全ての養殖魚が必要な分だけの餌を自動で供給するシステムの実現を目指し,西田研究室では養殖魚の活動量計測するシステムを搭載した無人給餌船の開発を国研や企業と共同で行っています.養殖魚の活動量計測センサについては,「開発したセンサデバイス」をご覧ください.下記に実施した養殖魚の活動量計測実験の様子を示します.
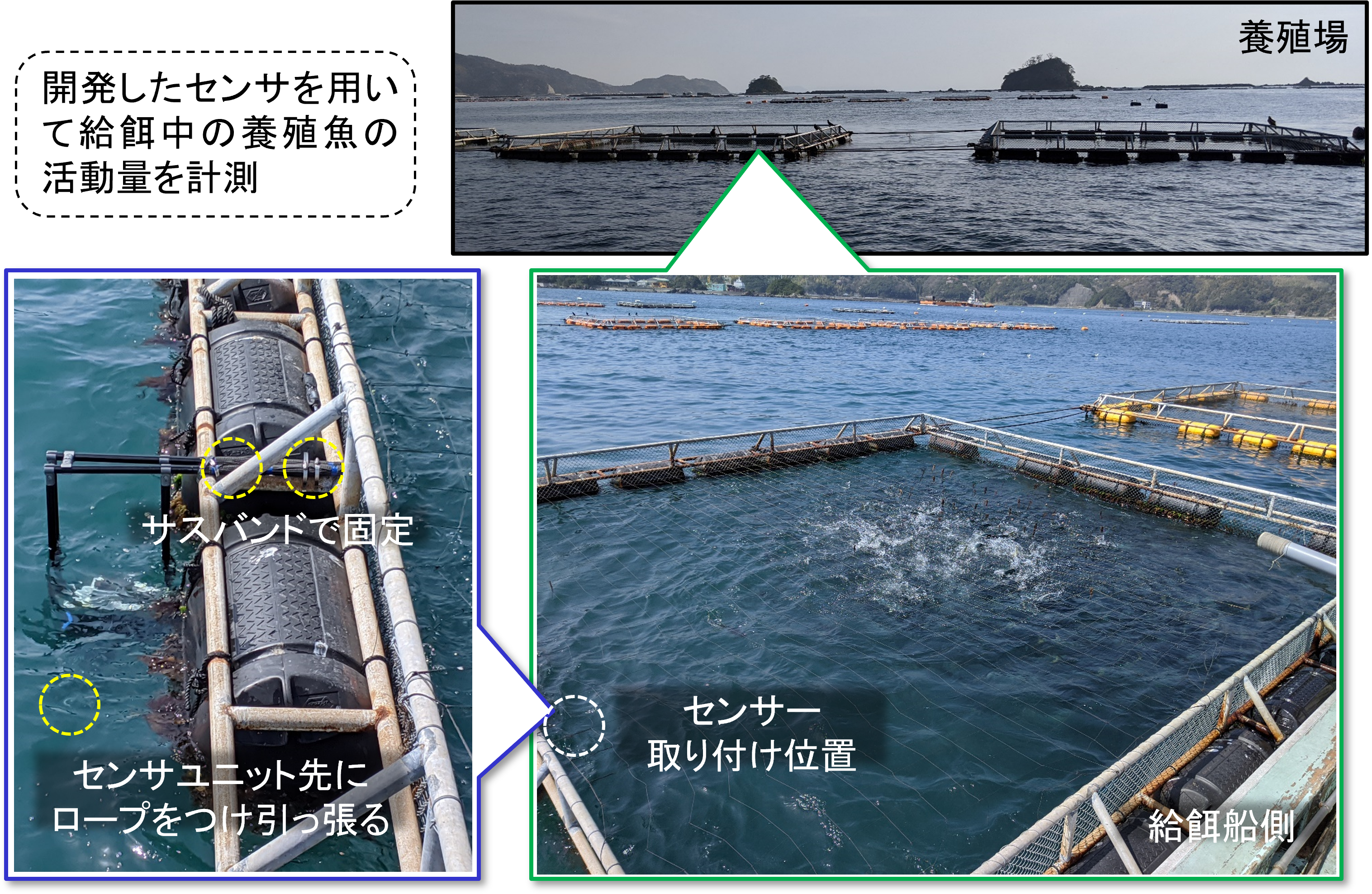
FIg. 流速センサを用いた養殖魚の活動量計測実験の様子
ケーブル拘束運動を用いた長期海底観測装置
世界的に海中工学の技術が向上しているが,いまだ海洋資源や周辺環境を長期的に観測する装置が実現していないため,海洋資源の生成や減少メカニズムは解明できるだけの十分なデータが計測できておらず,資源の有効利用に至っていません. 海洋資源開発に必要不可欠な時系列データを計測するために,低リスク(紛失リスクが少なく,紛失してもコスト的に損害が小さい)で広範囲に渡って海底を長期間観測できる装置の実現が望まれています.西田研究室では高価なセンサを搭載することなく低リスクで長期観測ができるケーブル拘束型海中ロボットを用いた長期観測装置を開発しました.ケーブルによる拘束状態を積極的に利用することにより制御を実装することなく3次元空間の運動が可能になり,比較的に安価なセンサだけで同じ軌道を長期間航行できます.下記にケーブル拘束運動を用いた長期観測装置の概要図を示します.
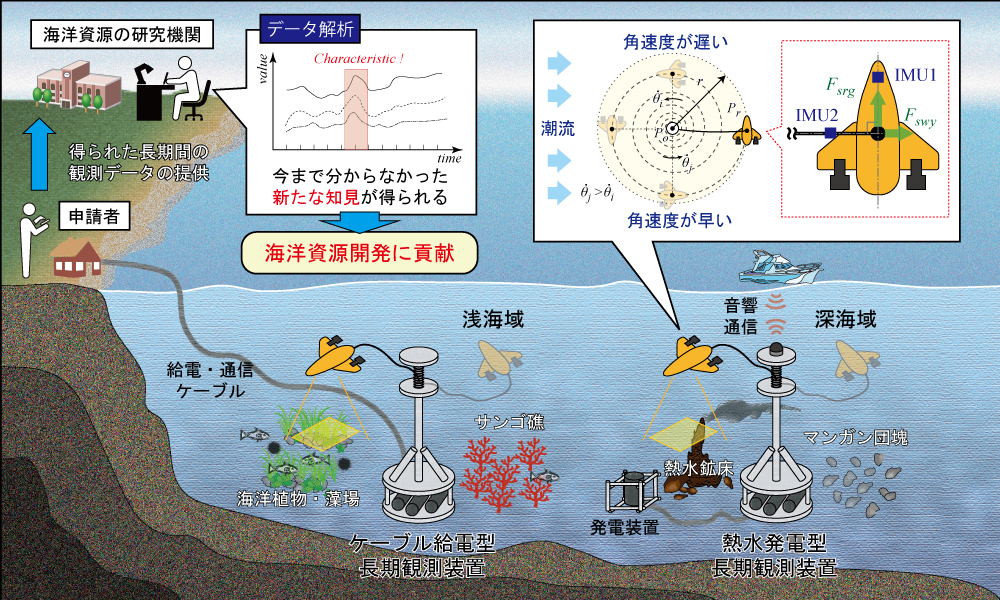
Fig. ケーブル拘束運動を用いた長期観測装置の概要図