
コバルトリッチクラスト調査用AUV ”BOSS-A”
コバルトリッチクラストの賦存量の自動調査を目的とし,西田が東京大学生産技術研究所のポスドク時代に浦教授やソーントン准教授らと共同で開発したホバリング型の自律型海中ロボット.最大深度は3,000m,最大航行時間は6~7時間,重量は580kgである.BOSS-Aにはコバルトリッチクラストの厚みを計測するための音響厚み計測装置,水平方向の大きさや分布を計測するためのカメラを用いた3次元形状計測装置が搭載されている.2015年に水深1,000m程度の片山海山にて自律型海中ロボットによるコバルトリッチクラストの自動観測に世界で初めて成功した.現在も現役でコバルトリッチクラストの賦存量調査に使われている.
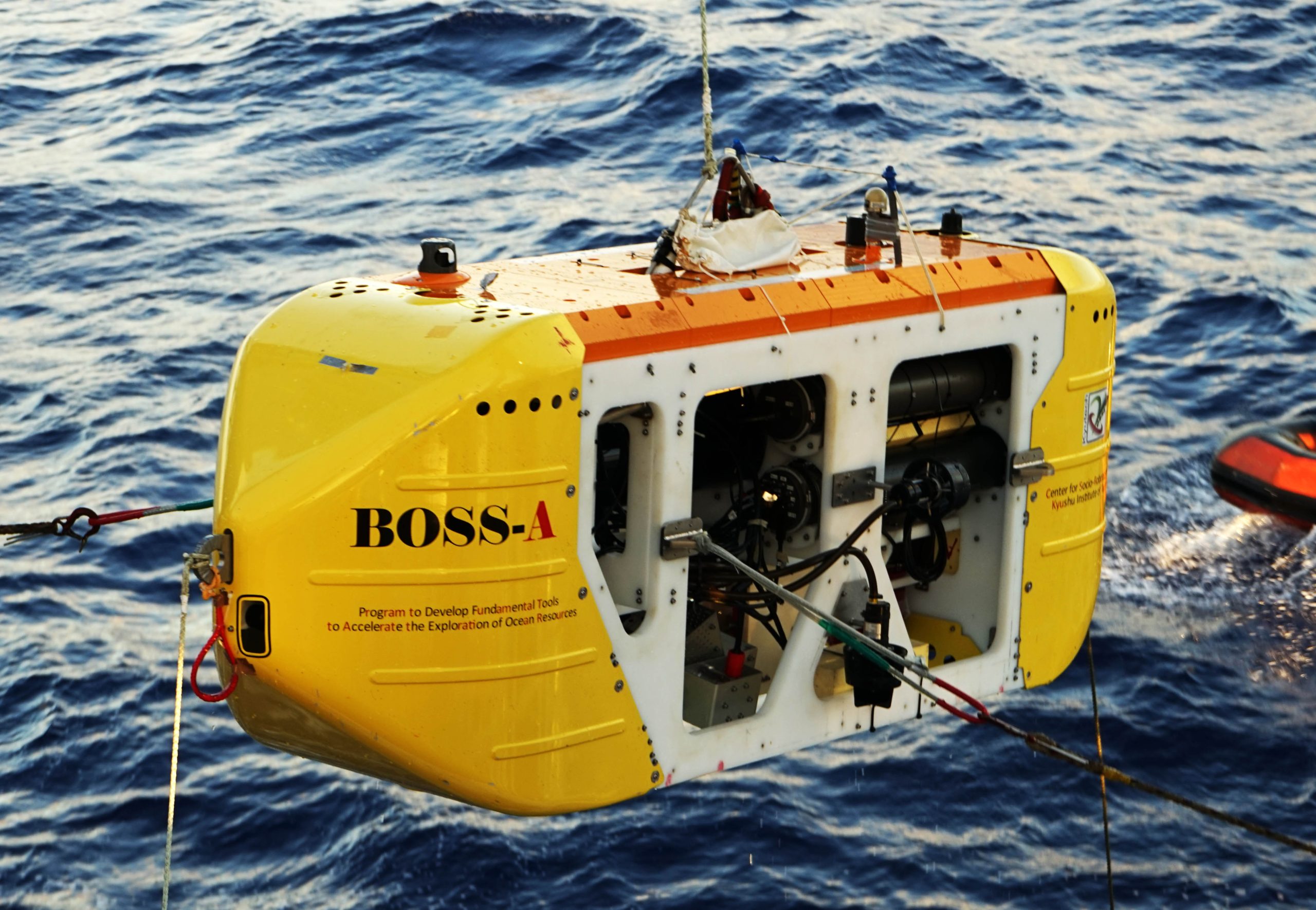
Fig. 海から回収されたBOSS-A
AUV管制のための自走式洋上中継器”ABA”
自律型海中ロボットを効率的に管制するために,西田が東京大学生産技術研究所のポスドク時代に浦教授やKDDI総合研究所と共同で開発した自走式の洋上中継器(ASV).ABAには自律型海中ロボットの位置を計測するためのUSBL音響計測装置,また複数台の自律型海中ロボットと通信するための音響通信装置が搭載されている.自律型海中ロボットが海底を観測中,ABAはそのロボットを追跡しながらロボットの位置や状態を監視し,その情報を長距離無線もしくは衛星通信経由で遠隔地にいるオペレータに送信することができる.2012年にABAのシステムを用いて3台の自律型海中ロボットの展開に成功し,2018年にABAに搭載されている管制システムを用いて海洋探査の国際大会であるShell Ocean Discovery XPRIZEにて準優勝することができた.
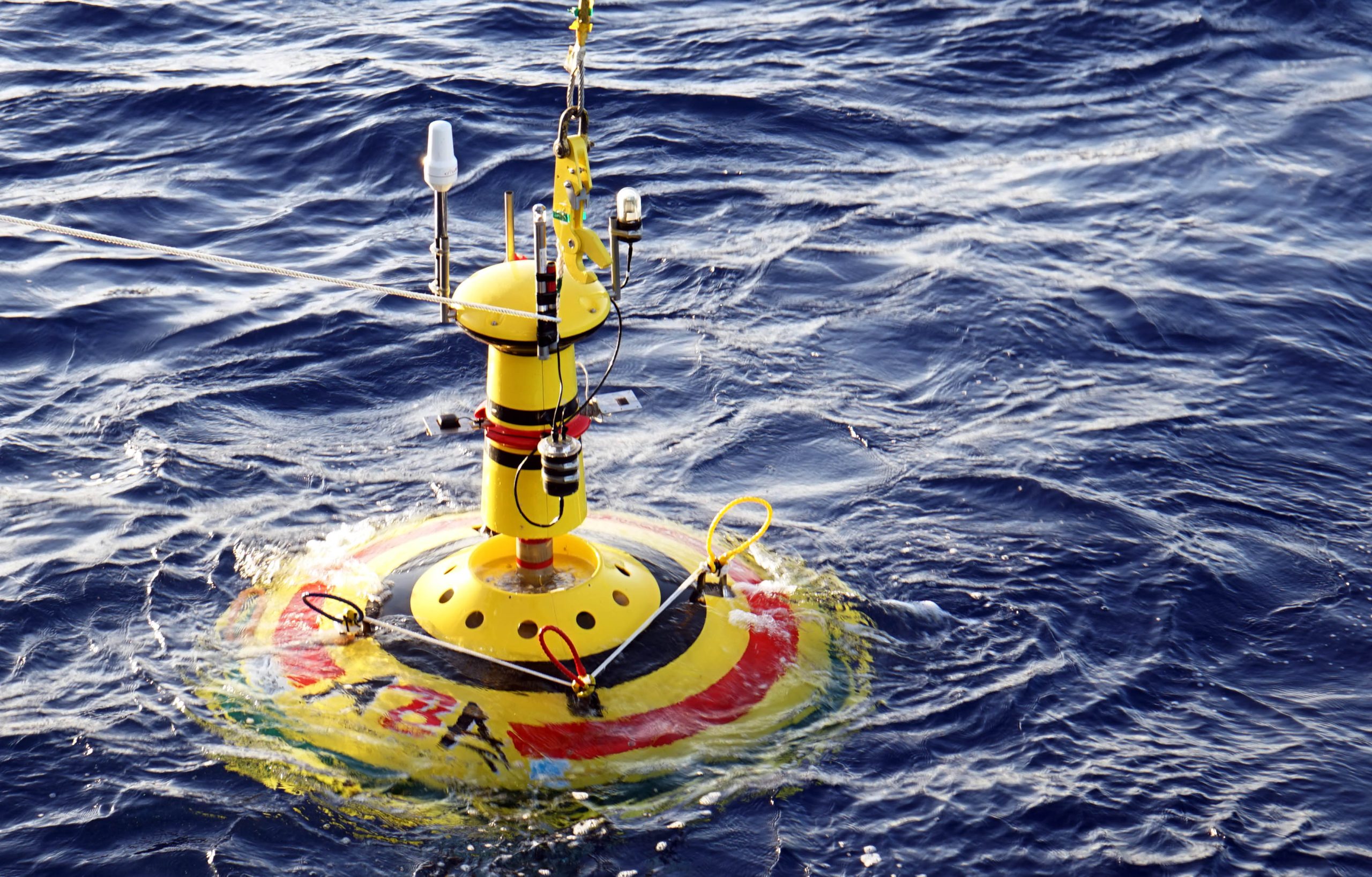
Fig. 海に投入中のABA
生物捕獲用AUV ”Tuna-Sand2”
JST CRESTのプロジェクトにて,東京大学の名誉教授である浦先生が作られたTuna-Sandをもとに東京大学生産技術研究所と共同で開発したホバリング型の自律型海中ロボット.最大深度は2,000m,最大航行時間は8時間,重量は380kgである.調査海域に投入後,Tuna-Sand2は設定されたウェイポイントに沿って自動航行しながら海底にいる生物を探索し,生物を検出したら生物の画像を圧縮し音響通信にて船上にいるオペレータに送信する.オペレータは不定期にTuna-Sand2から送られてくる画像の中から捕獲したい生物が移った画像の番号を音響通信経由でTuna-Sand2に指定する.捕獲生物の番号の情報を受信後,Tuna-Sand2は撮影した画像をもとに生物を探索し,自身に搭載したスラープガンにて生物を捕獲することが可能である.2018年に駿河湾の水深100m地点にて,世界で初めて自律型海中ロボットによる観測中に発見した生物(貝殻)の捕獲に成功した.現在は本研究室の研究用プラットフォームとして様々な研究に利用されている.
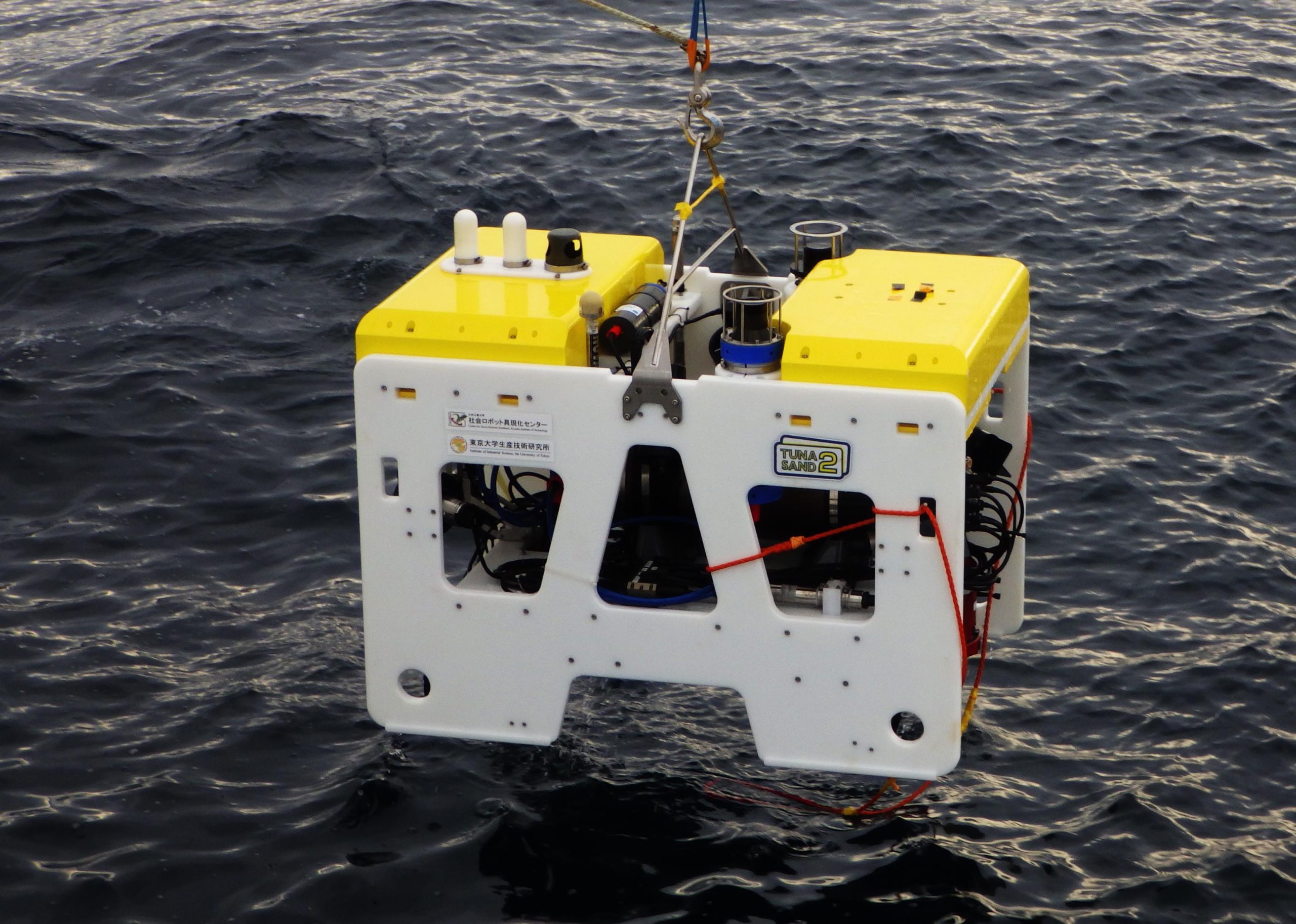
Fig. 海から回収しているTuna-Sand2
汎用AUV ”KYUBIC”
学生プロジェクトのメンバーを中心に,水中ロボットに関する様々な要素技術の開発のために開発されたホバリング型の自律型海中ロボット.最大水深は20m,最大航行時間は2~3時間,重量は32kgである.KYUBICには自律型海中ロボットに必要不可欠なセンサを全て搭載している.2019年に完成して以来,KYUBICを用いて国内外の様々な水中ロボット競技会に参加し,2020年から沖縄海洋ロボコンAUV部門にて3連覇の偉業を達成している.また,MEMSマイクを用いたハイドロフォンアレイをKYUBICに搭載し,2022年の沖縄海洋ロボコンにて史上初となるピンガ―トラッキングを含めた全タスクを完全制覇することができた.

Fig. 陸上で調整中のKYUBIC
船底清掃ロボット Gen.4
九州工業大学の石井教授を中心に,船舶の底面に付着した藻や汚れを清掃することができる遠隔操縦型海中ロボット.最大水深は30m,重量は32kgである.船底に藻や汚れが付着した状態が続くと,そこにフジツボなどの生物が付着し船舶の航行時の燃費が大幅に低下することが報告されている.燃費を維持するために,船舶の所有者はダイバーによる清掃やドックに引き上げてからの清掃を行っているが,その清掃費用は膨大であるため頻繁に清掃することができていないのが現状である.定期的な清掃による船舶の燃費維持のため,搭載したブラシで船底に付着した汚れを除去する本ロボットが開発された.
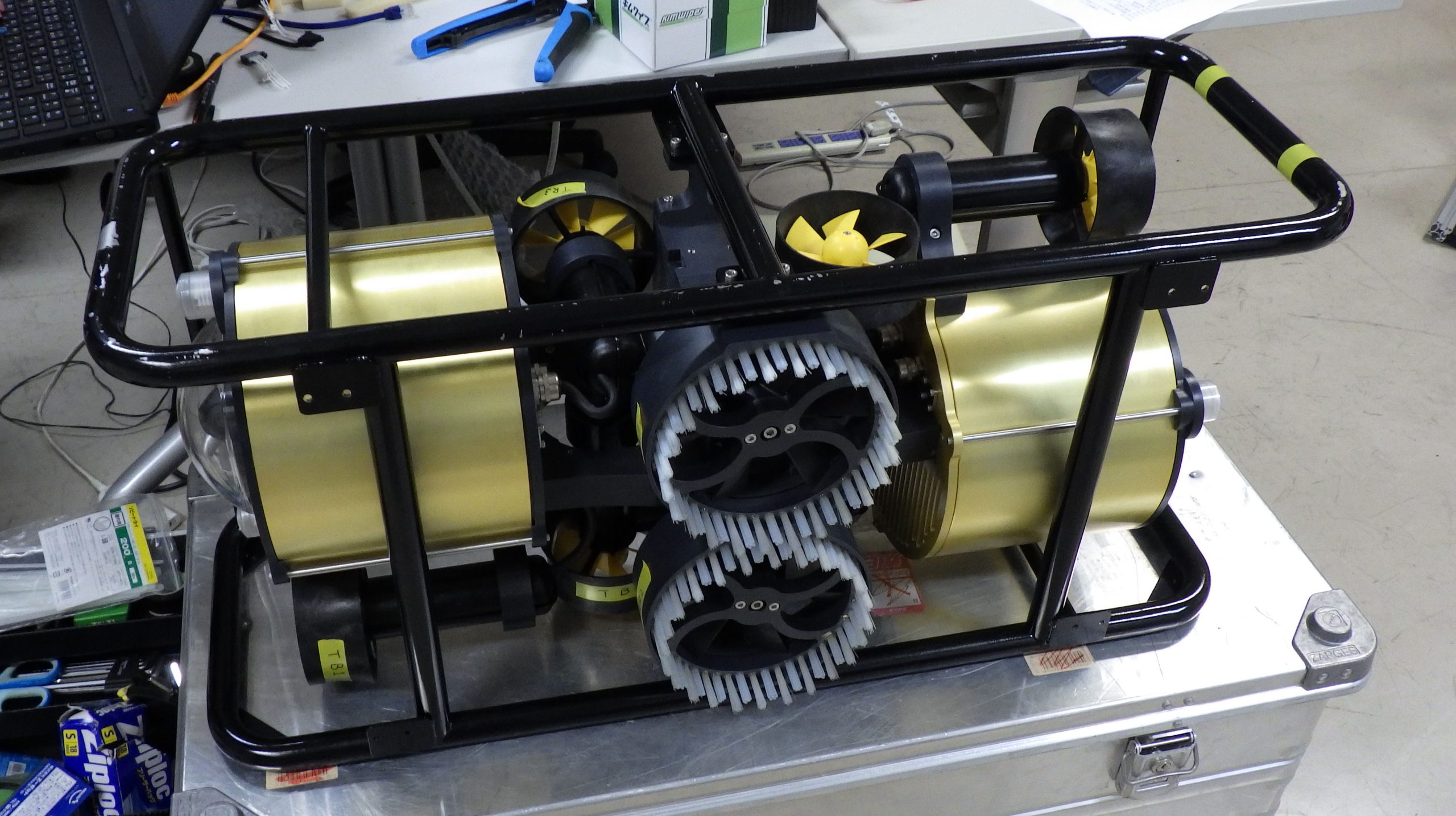
Fig. 船底清掃ロボット