
構造化光を用いた水中3次元形状計測装置
効率的な水産資源調査の実現を目指して開発したレーザプロジェクタとカメラで構成された水中3次元形状計測装置.レーザプロジェクタにて計測対象に6種類の色で構成されたデブルーイン系列に基づいたライン状のレーザパターン(構造化光)を照射すると,対象の位置や形状によってレーザラインが変化する.その対象で反射したレーザ光をカメラで撮影し,画像処理にてレーザ光の識別やデブルーイン系列のデコーディングを行う.デコーディングをもとに三角測量の法則により対象までの距離(奥行き)を算出したのち,画像の写像関係(ピンホイールカメラモデル)から水平方向の位置を算出する.本装置を用いた水槽試験にて,1m先にある物体を0.1~1mmオーダーの分解能で形状計測に成功した.
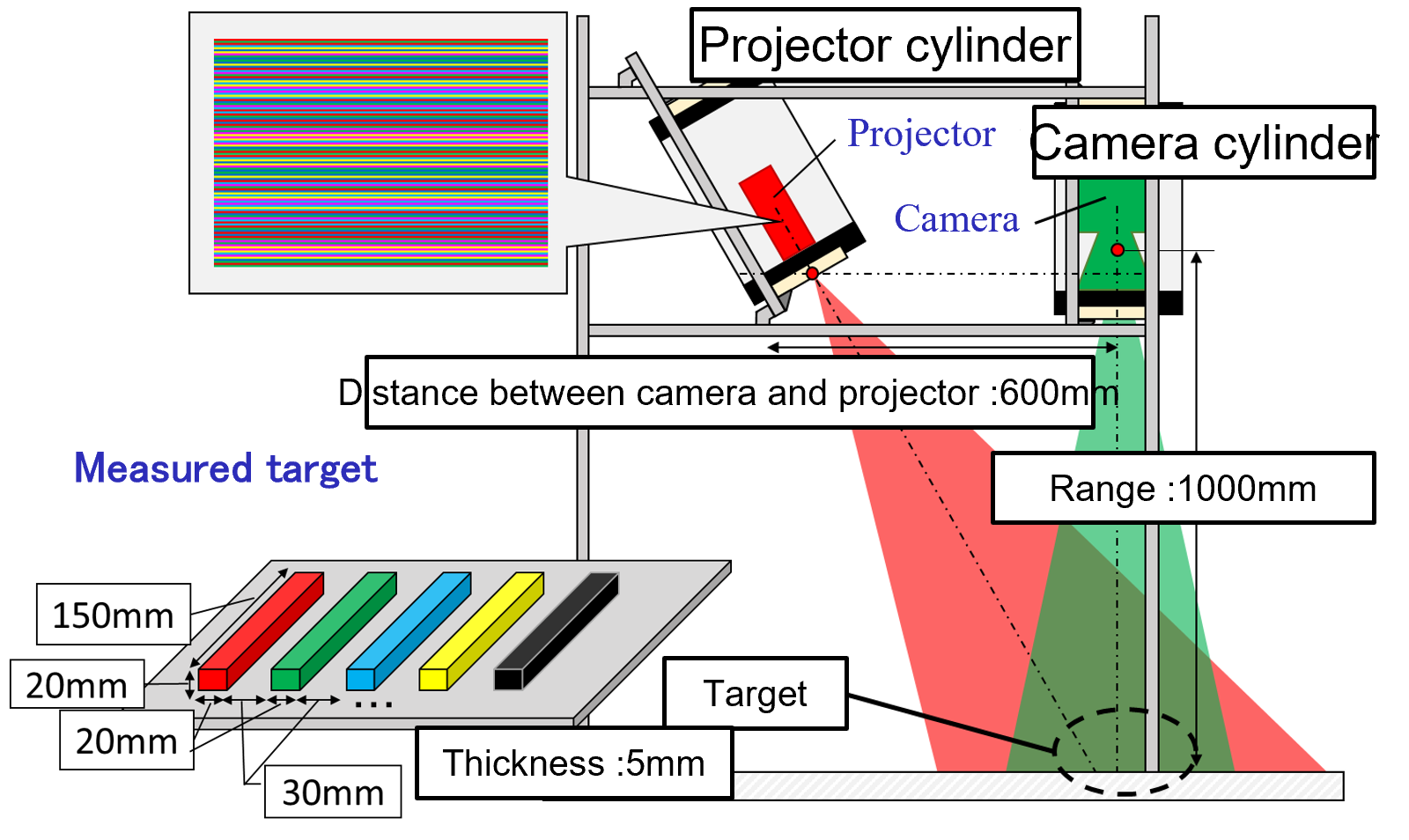
Fig. 水中3次元形状計測装置による計測概要
養殖魚の活動量計測センサネットワーク
A-STEPのプロジェクトにおいて,ベルテクネ株式会社と共同で開発した養殖生け簀内にいる魚のエサの食いつき度合(空腹状態)を推定する計測システム.本システムは,2~3個の流速センサモジュールを鉛直方向に並べたセンサユニットを複数使用する.養殖生け簀内の魚は餌を食べる際に水面に集まって活発に遊泳し,餌を食べ終えたら安全な深度(生け簀の下部)に潜行してゆっくり遊泳する性質がある.本システムを用いて魚の遊泳によって発生する流速を計測することで,どの水深帯に活発に遊泳している魚がいるかを特定し,魚の餌の食いつき度合を推定する.2021年に実際の養殖生け簀内で行った試験にて,各深度帯の流速値と魚の餌の食いつき度合に密接な関係性があることを示した.
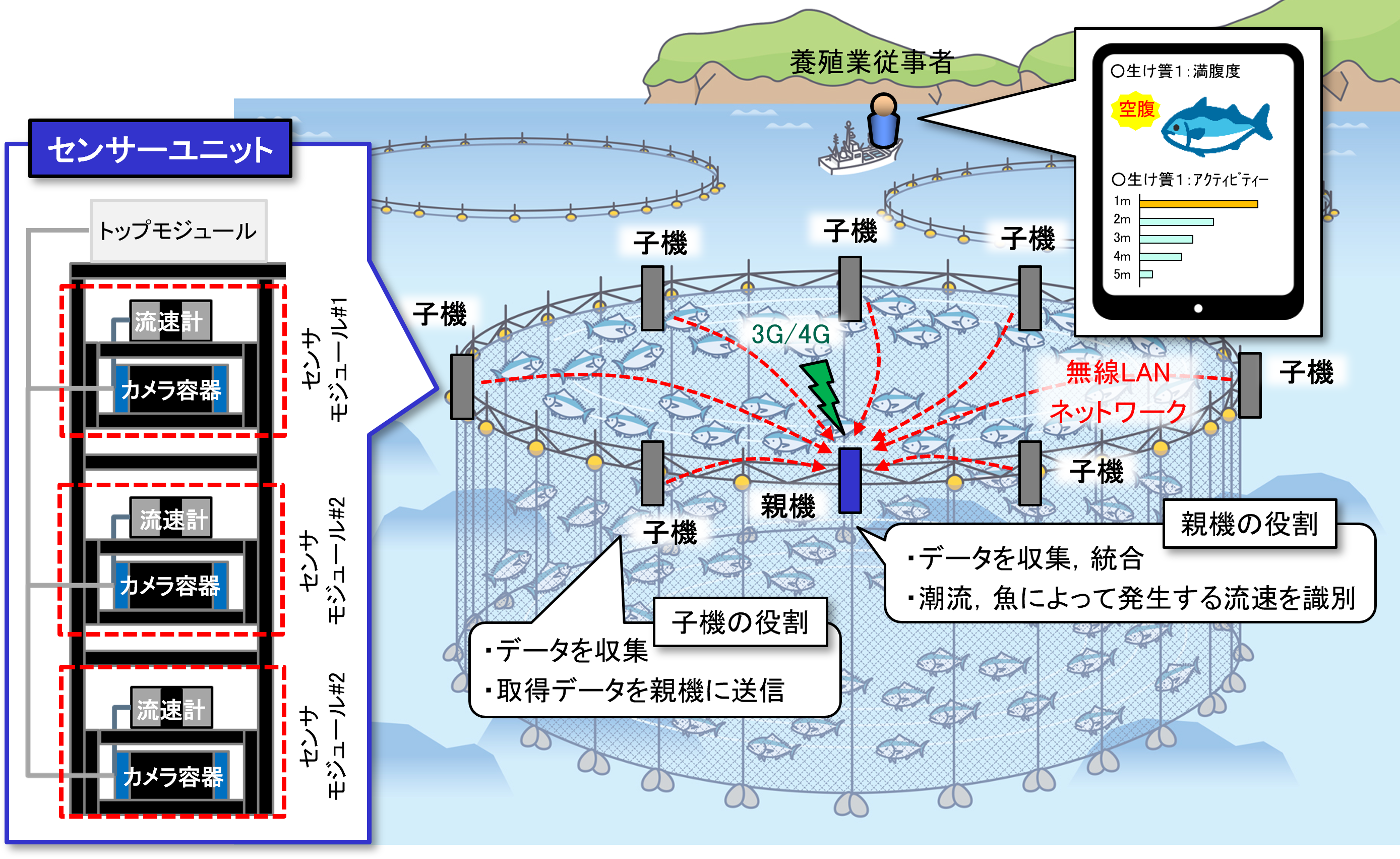
Fig. 流速センサネットワークを用いた養殖魚の活動量計測システム概要
水中光学環境センサ
光の減衰が大気中より非常に大きい水中や海中で実際と同じ色の画像を撮影することを目指して開発したセンサ.本センサは水の減衰を計測するモジュール,散乱を計測するモジュール,太陽光などの外乱光を計測するモジュールの3つで構成されており,各モジュールには分光センサおよびセンサ値を取得するためのdspマイコンボードが搭載されている.ロボットなどを用いて海底を撮影した際に,本センサで撮影地点の減衰,散乱,外乱光を同時に計測することによって,劣化した撮影画像の色を復元することができる.

Fig. 開発した水中光学環境センサの外観