1. サンプリングAUV の知能化技術
[概要]
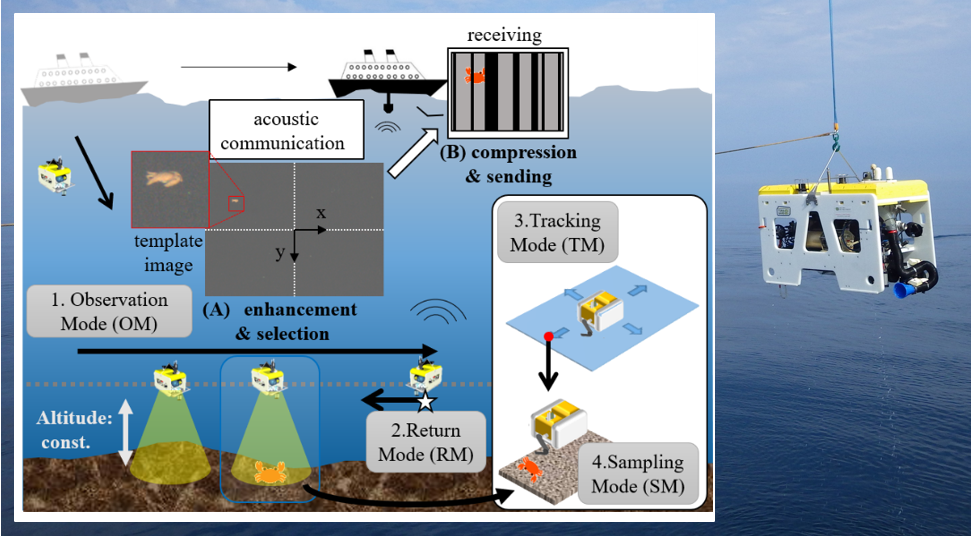
水産資源や生物学の学術的知見の蓄積のために海洋生態系を調査する技術の開発や運用手法は重要です。我々のグループでは海底物を採取する新たな自律型海洋ロボットである「サンプリングAUV(Autonomous Underwater Vehicle)」の構築に取り組んでいます。サンプリングAUVに優れた海底の様子の観測機能や海底物採取機能を実装するために、本研究室では水中画像の青かぶれを補正する技術や採取対象物をトラッキングする技術等、様々なタスクに対する画像センシング手法やそれを組み込み実装する手法を研究しています。
課題やキーワード :
水質や照明に順応した画像取得カメラ開発、Sampling-AUV、水中画像補正法、水中音響通信用画像圧縮法、水中生物画像トラッキング法、visual SLAM、音響通信技術、統合ソフトウェア 設計法 etc…
[主な業績 ]
S. Yasukawa, J. Ahn, Y. Nishida, T. Sonoda, K. Ishii and T. Ura, “Vision System for an Autonomous Underwater Vehicle with a Benthos Sampling Function“, Journal of Robotics and Mechatronics, Vol. 30, No. 2, 2018.
Y. Nishida, T. Sonoda, S. Yasukawa, K. Nagano, M Minami, K. Ishii and T. Ura, “Underwater Platform for Intelligent Roboitics and Its Application into Two Visual Tracking Systems“, Journal of Robotics and Mechatronics, Vol. 30, No. 2, 2018.
J. Ahn, S. Yasukawa, T. Sonoda, Y. Nishida, T. Ura and K.Ishii, “Enhancement of Deep-Sea Floor Images Obtained by an Underwater Vehicle and its Evaluation by Crab Recognition Journal of Marine Science and Technology“. Issue 4, Volume 22, pp 758–770, December 2017.
J. Ahn, S. Yasukawa, T. Sonoda, Y. Nishida, K. Ishii, & T. Ura, “An Optical Image Transmission System for Deep Sea Creature Sampling Missions Using Autonomous Underwater Vehicle. IEEE Journal of Oceanic Engineering., 2018.
etc…
・その他、生体規範型の水中用途センサ開発はこちら.
→ Research