自動運転グループ
自動運転に必要な外界から得られる情報を処理し危険予測を行うAIを開発
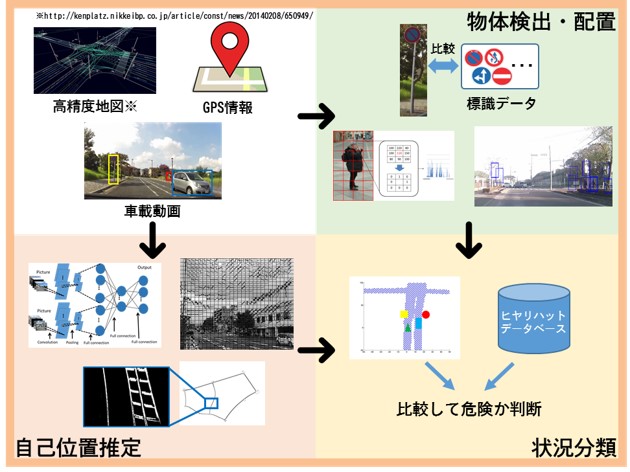
近年,多くの企業や学術機関において自動運転技術の研究開発が盛んに行われています.現在,堀尾研究室では,画像処理などを用いた外界認知や機械学習を用いた危険予測の技術を研究しています.
現在取り組んでいる具体的なテーマは,
- 車載カメラを用いた人や物体の識別および自己位置推定
- 地図データを用いた自車周辺状況のシーン分類
などです.
関連する主な論文・発表
- Jaipralash Narain Dwivedi, Hiroaki Koga, Tetsuo Furukawa, Keiichi Horio, “Road Shape Clustering for Analysis of Collision Risk of Autonomous Vehicle,” ICIC Express Letters Part B, (Accepted)
- 水谷龍希,古川徹生,堀尾恵一,"多層自己組織化マップによる状況分類と自動アノテーションの試み",第33回ファジィシステムシンポジウム,pp675-678,9月13日-15日,2017